

Intelligent power dropping track online planning method
A power descent and trajectory planning technology, which is applied to motor vehicles, aerospace vehicle guidance devices, aerospace equipment, etc., can solve problems such as excessive deviation of the center of mass of the lander, excessive altitude and speed, and propellant tension. The effect of extensive application value and market prospect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
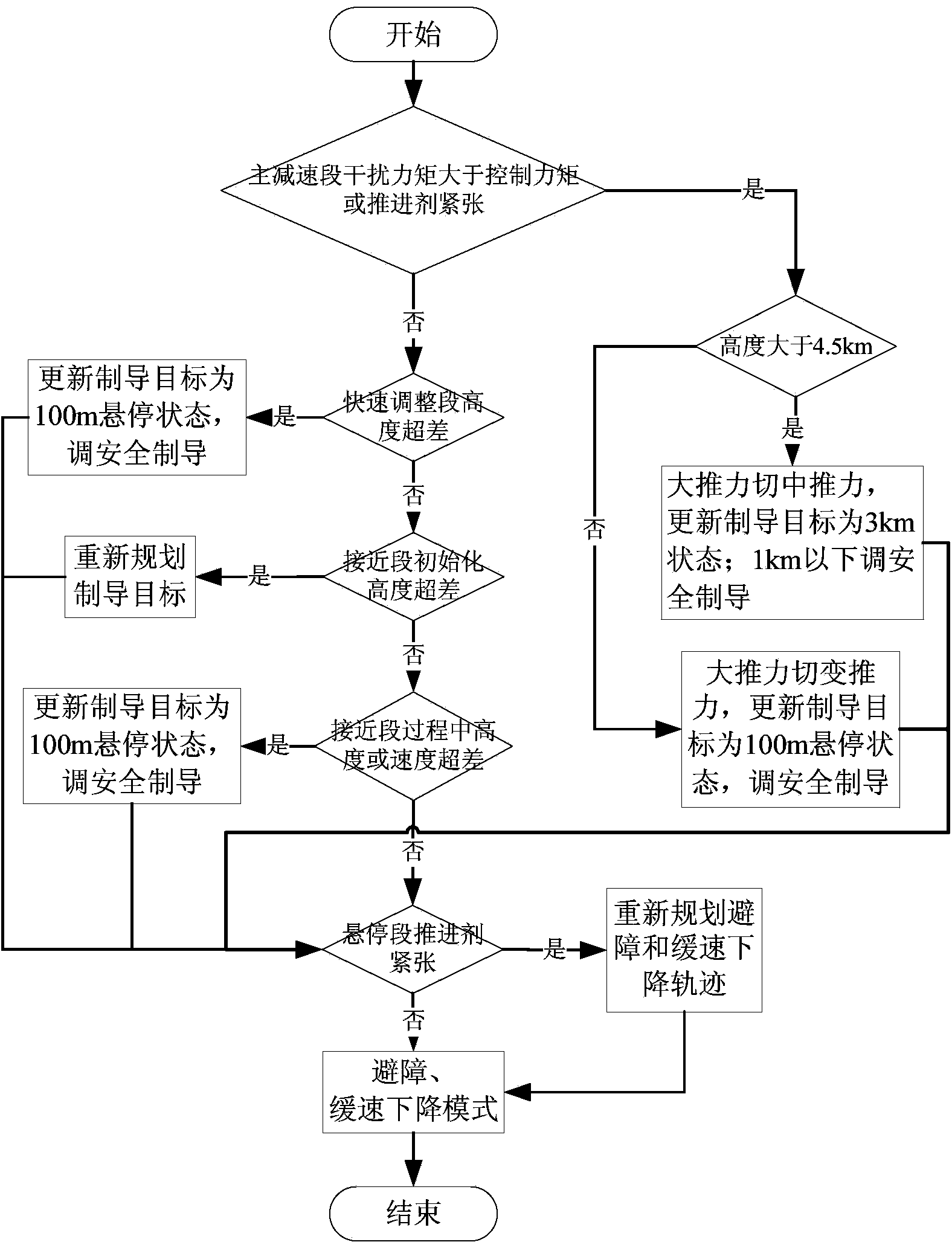
[0019] like figure 1 Shown, the present invention is concretely realized as follows:
[0020] (1) For the main deceleration section, judge whether there is propellant tension or the disturbance torque generated by the main engine is greater than the control torque, and the attitude of the main deceleration section is continuously out of tolerance. If so, set the flag BKFlag=1 (online intelligent trajectory planning is required ); if it does not appear, set BKFlag=0 (do not perform online trajectory planning, execute in the original normal mode), and enter the fast adjustment section after control.
[0021] (2) If BKFlag=1, ①If the altitude is above 4.5km, the main engine will switch from high thrust to medium thrust, the target state of 3km will be changed to the target state of 1km, and the structure of the main deceleration guidance law will remain unchanged, that is, only need to be replaced Guidance target; call safe mode guidance law below 1km.
[0022] (1) Handover str...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More