

Robot capable of synchronously climbing stairs
A technology for robots and stair climbing, applied in the field of robots, can solve problems such as use restrictions, inflexible movements, and bulkiness, and achieve the effects of simple structure, easy manufacturing, and not easy to fall over.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. Based on the premise of the technical solution of the present invention, this embodiment provides a detailed implementation manner and a specific operation process. It should be noted that those skilled in the art can make several equivalent changes and improvements without departing from the concept of the present invention, and these should belong to the protection scope of the present invention.
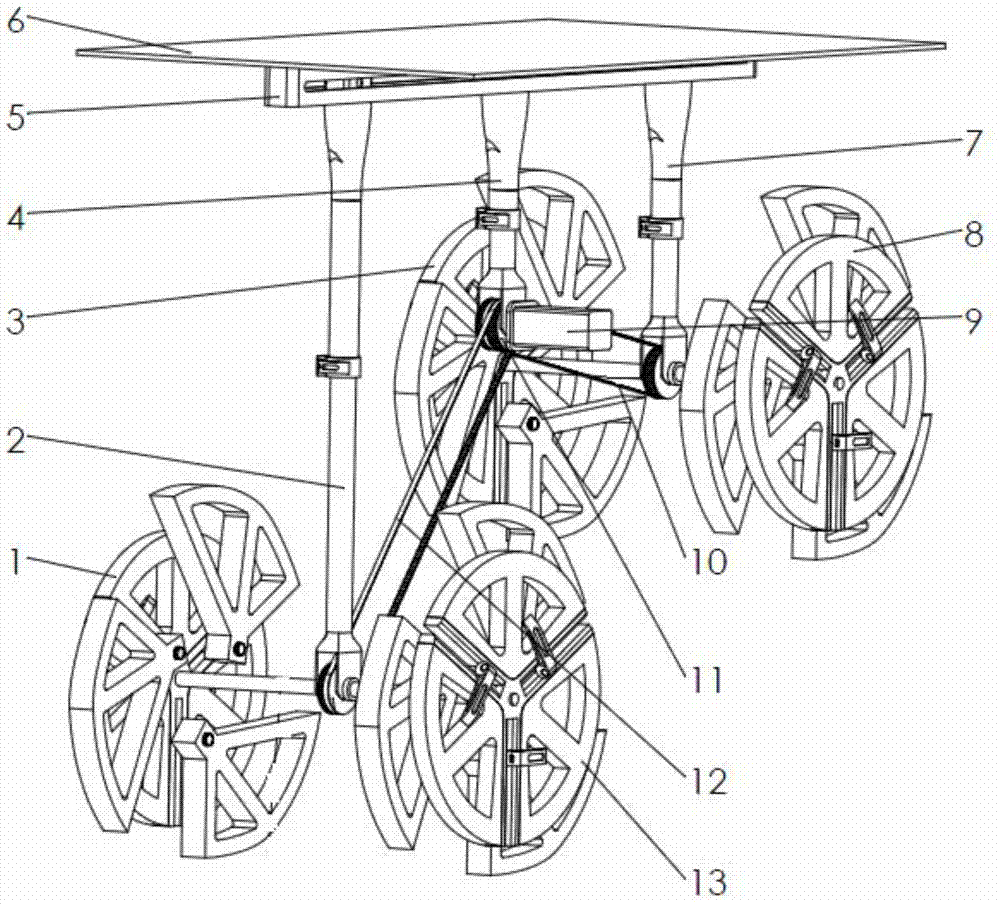
[0031] see figure 1 , the synchronous stair-climbing robot includes a pallet part, a first walking part 8, a second walking part 1 and a rotary drive device.
[0032] The tray component includes a tray 6 , a guide groove 5 , a first support 7 , a second support 4 and a third support 2 .
[0033] The pallet 6 is a horizontal flat piece, which can bear a large load. The guide groove 5 is fixed on the lower part of the tray 6 along the front-rear direction. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More