

Singularity-avoiding input parameter value space method for avoiding kinematic singularity in parallel mechanisms
A technology for inputting parameters and mechanism motion, applied in electrical digital data processing, special data processing applications, instruments, etc., can solve the problem of not ensuring that the spatial distribution surface of singular positions does not have other singular position distribution surfaces, and achieve high load capacity. , easy to implement, simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
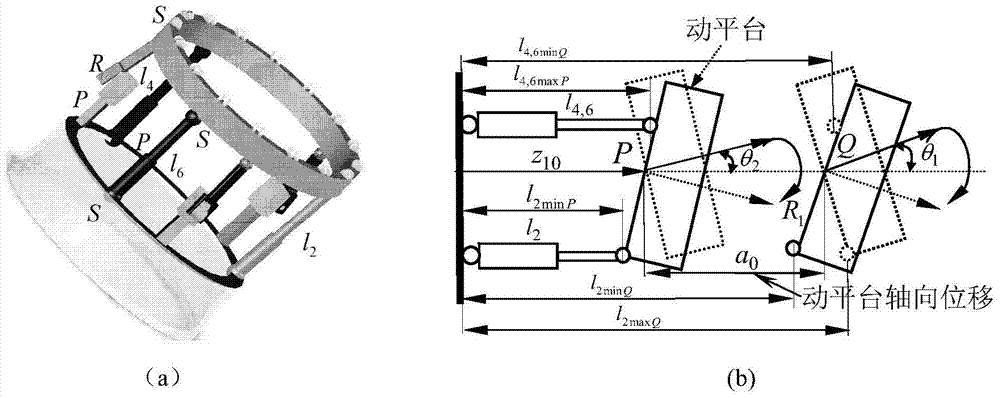
[0027] Below to figure 2 The 3SPS-3PRS parallel mechanism shown in a is taken as an example, and the specific implementation process of the present invention is described in detail.
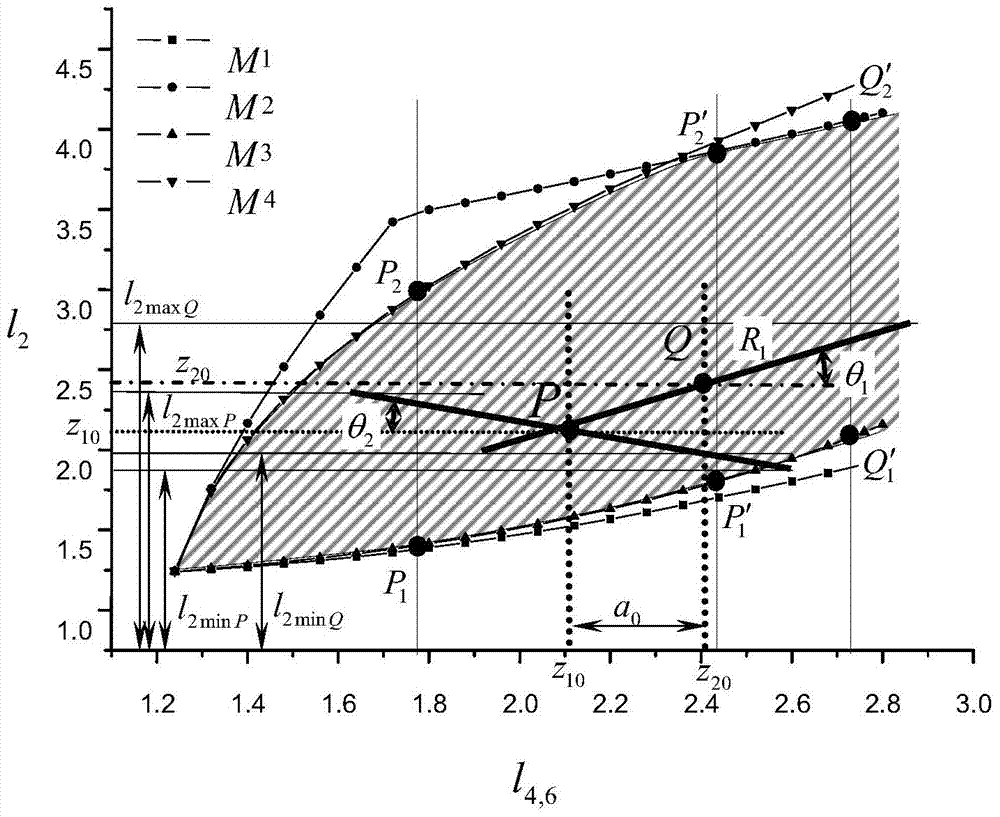
[0028] The working requirements of the 3SPS-3PRS parallel mechanism are as follows figure 2 as shown in b. When the center of the moving platform is at point P, the moving platform can realize the universal deflection (synthetic deflection around the x-axis and y-axis) of its normal relative to the fixed platform axis (z-axis) θ 2 ; At point Q, the universal rotation angle of the moving platform is θ 1 ; At other positions between two points, the universal deflection angle of the moving platform is between θ 1 ~θ 2 between.
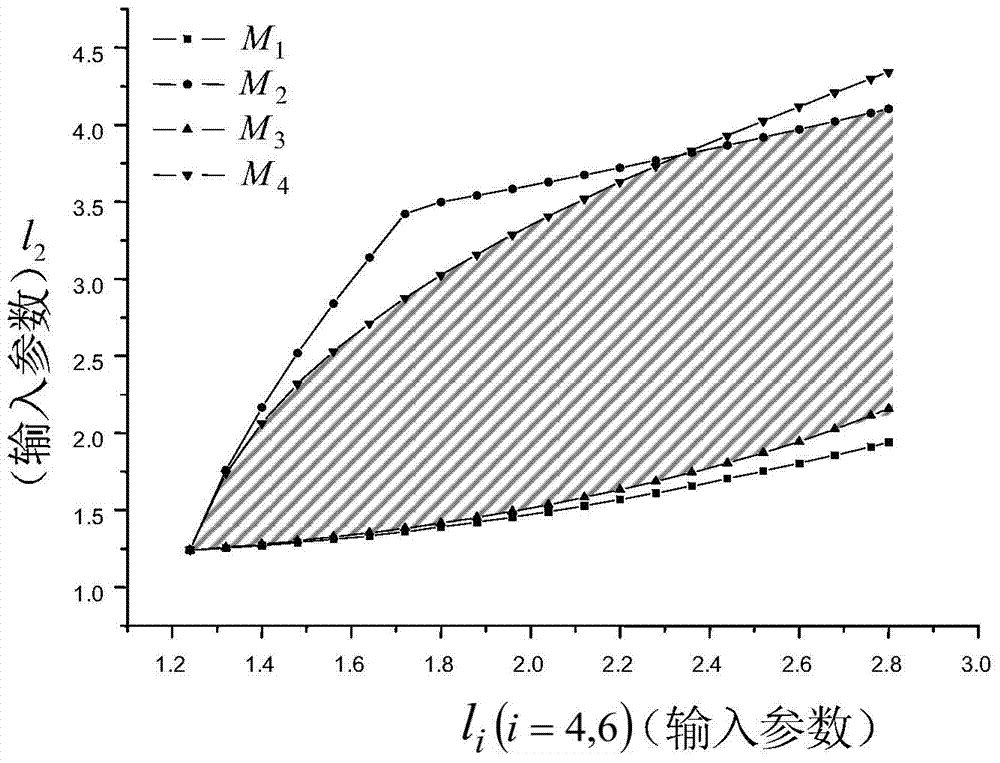
[0029] Step 1: Construct the singular position spatial distribution surface of the parallel mechanism with the input parameters as the coordinate axes.
[0030] Establish the configuration equation F(x,μ)=0 of the parallel mechanism. The configuration parameter x ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More