

Point cloud relative pose estimation method based on three-dimensional curve matching
A relative pose, three-dimensional curve technology, applied in computing, image data processing, 3D modeling, etc., can solve problems such as large amount of computation, dependence on initial pose, difficult to apply matching, etc., to achieve the effect of reducing the amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
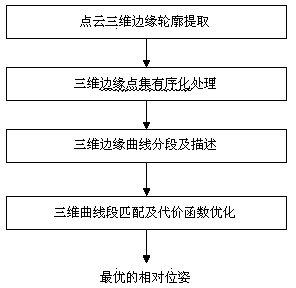
[0049]The point cloud relative pose estimation method based on 3D curve matching is to decompose the edge contour curve of the 3D point cloud into several arc segments, and define the vectorized description of the 3D curve based on the arc segments. For two frames of point cloud data, Compare and match the vectorized descriptions of their edge contour curves, and calculate the relative poses of two frames of point cloud data. The specific steps are as follows:
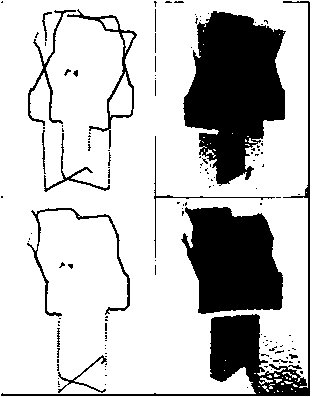
[0050] 1) Extract the edge contours of two frames of input point clouds respectively, and obtain a 3D point set representing a 3D edge contour curve , ;
[0051] 2) For 3D point sets respectively , Extract the collection of ordered point sets , , each ordered point set or Both represent a three-dimensional curve;
[0052] 3) Put each ordered point set or Decompose, each subset after decomposing represents an arc segment, and establishes a feature description vector of each arc;
[0053] 4) Match th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More