

Hierarchical target allocation method for multiple unmanned aerial vehicle formations
A technology of target allocation and multi-UAV, applied in the field of multi-UAV formation and hierarchical target allocation, which can solve the problem of long calculation time and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
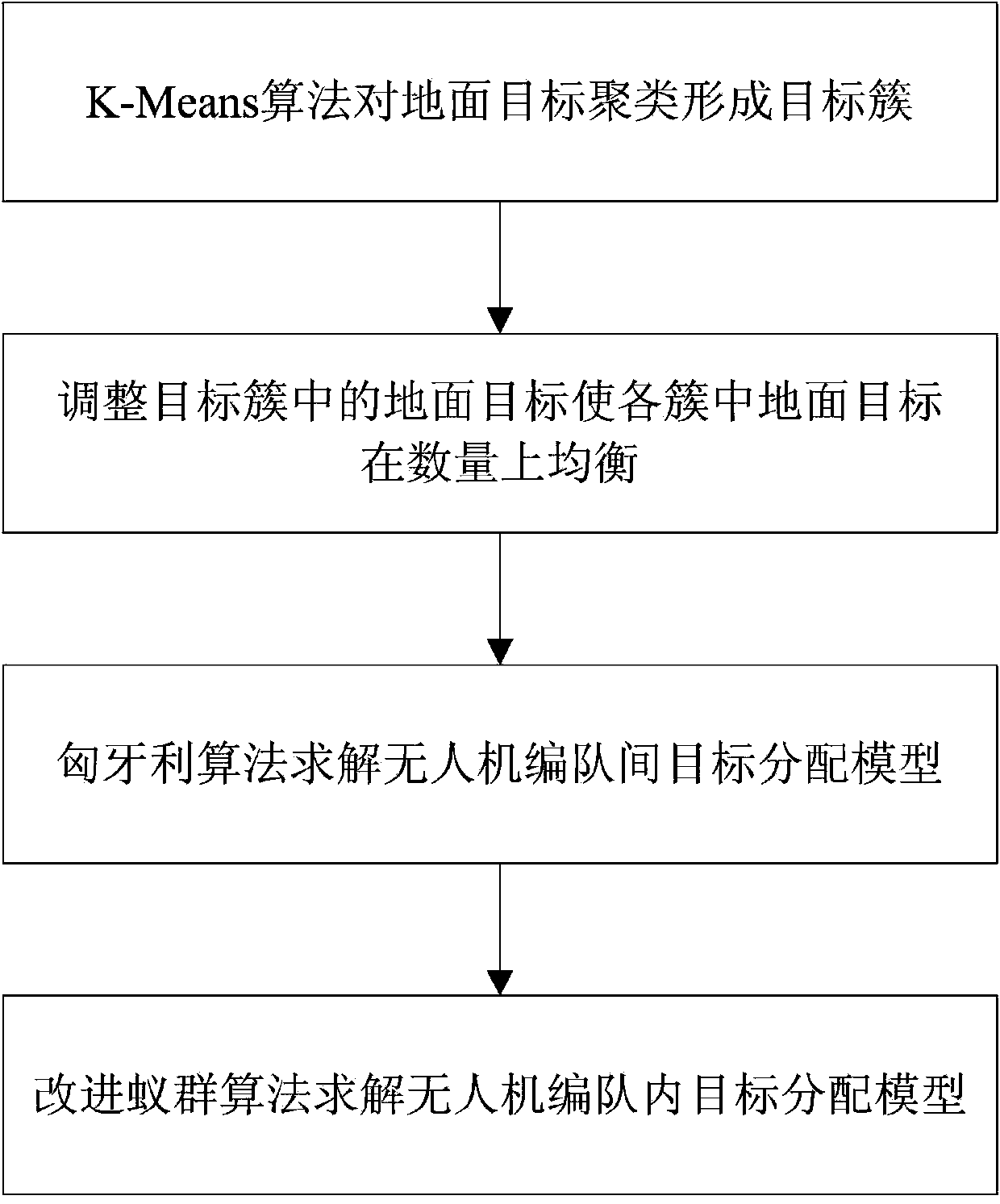
Method used
Image


Examples
Embodiment Construction
[0100] In this embodiment, a multi-UAV formation layered target allocation method is to set a vertex of a circumscribed square of the mission area as the origin O in the mission area where the UAV formation attacks the ground target, and set the two points of the origin O The two adjacent sides are respectively set as the X axis and the Y axis to form the coordinate system XOY. In the coordinate system XOY,
[0101] Assuming that there are M UAV formations to perform tasks together, M UAV formations are recorded as U={U 1 ,U 2 ,...,U m ,...,U M}, 1≤m≤M; U m Indicates the mth UAV formation, UAV formation U m at the mth airport A m ;Airport A m The position of is denoted as (ax m ,ay m ); each UAV formation has R UAVs, then there are R×M=N V unmanned aerial vehicle, denoted as u p Indicates the pth UAV; UAV u p The amount of ammunition loaded is recorded as B; UAV u p The maximum voyage of is denoted as S max ;
[0102] Suppose there are N T ground objects marke...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More