

Humanoid robot feet
A robotic foot and human-like technology, applied in the field of robotics, can solve the problems of no human foot arch structure and inability to walk, and achieve the effect of compact mechanism structure, low energy consumption, and improved stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
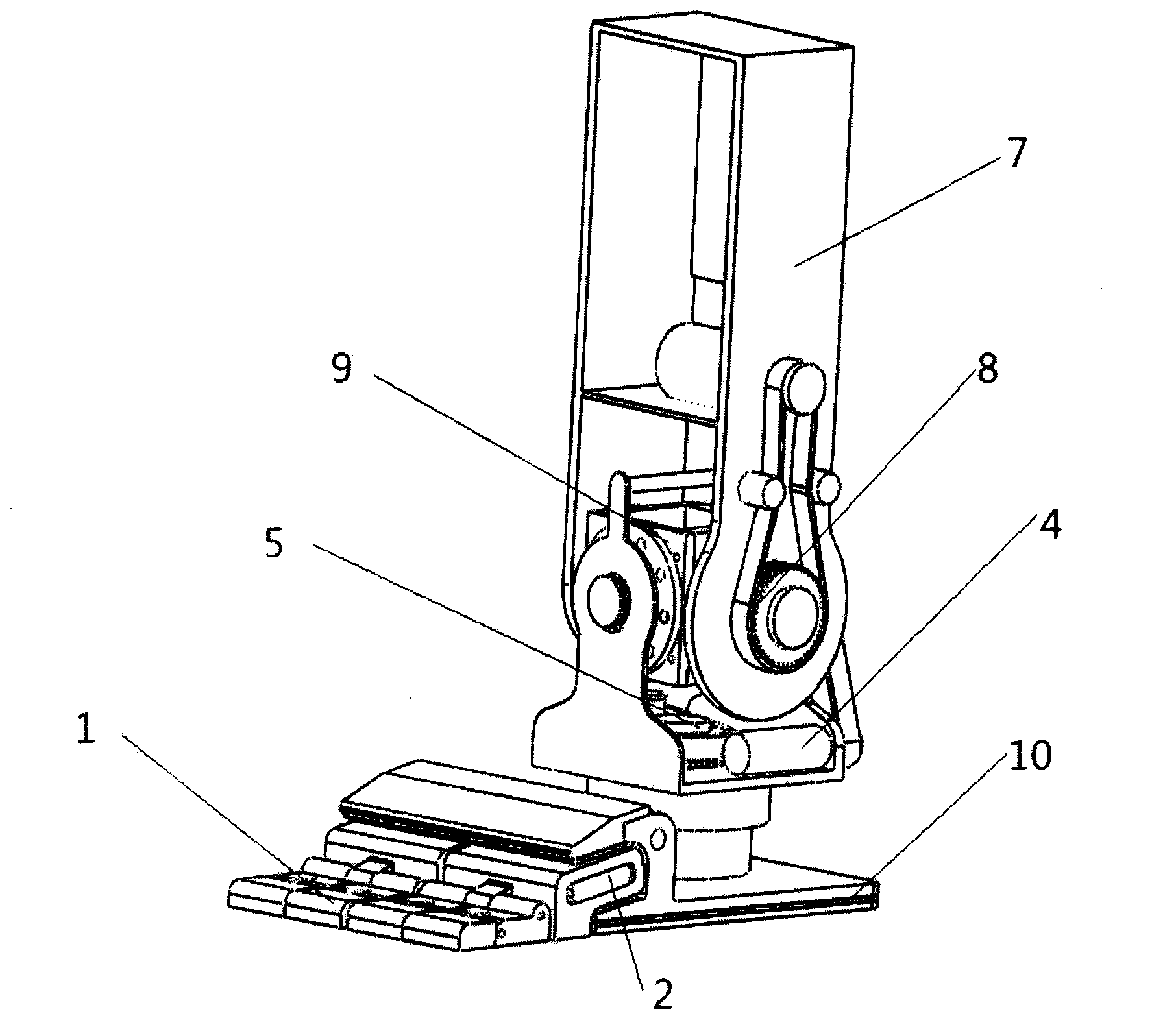
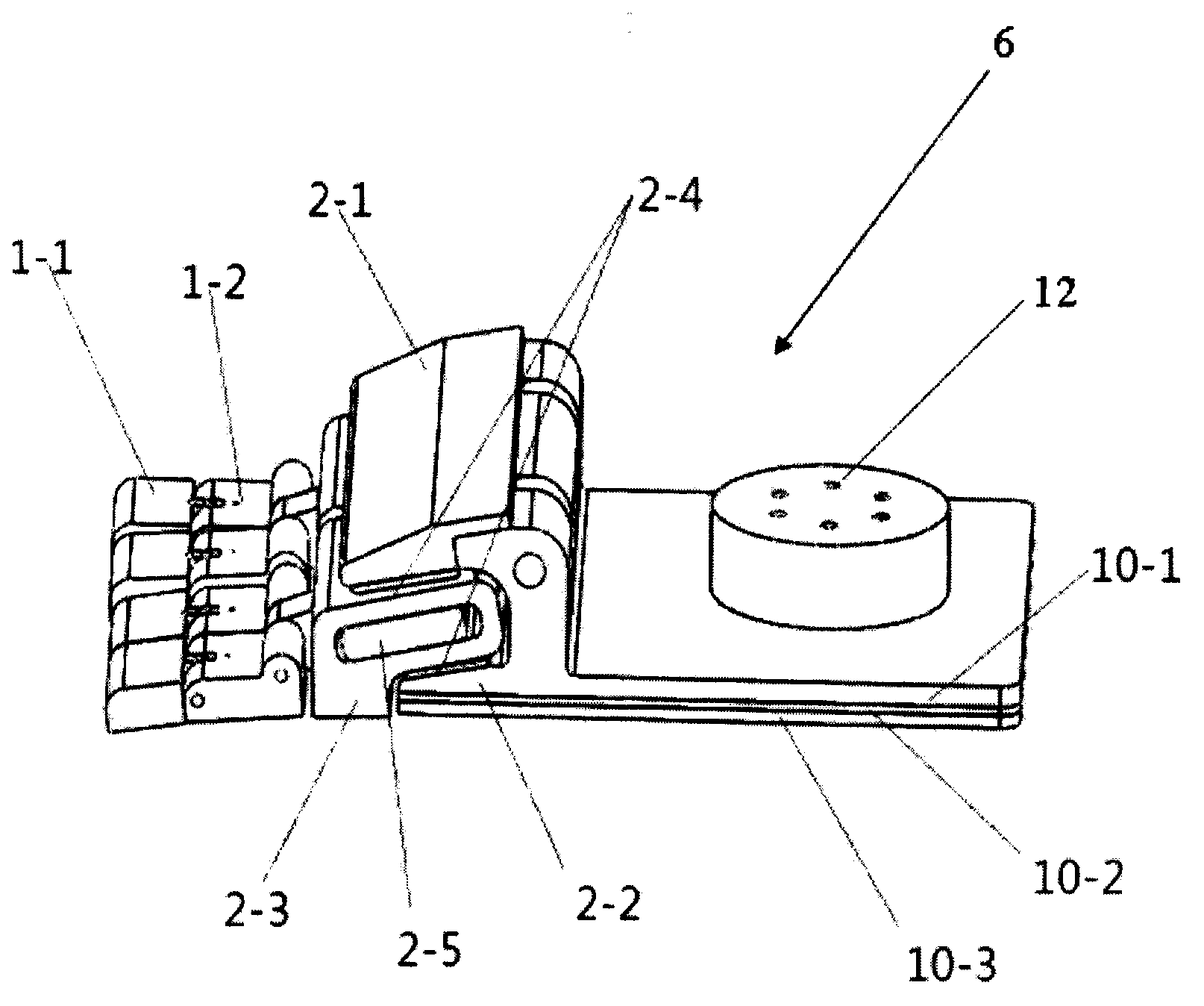
[0026] Such as Figure 1 to Figure 5 As shown, a humanoid robot foot has a humanoid sole 6 and a robot calf 7 connected to the sole 6 through an ankle joint. The sole 6 includes a toe 1, an arch body 2 and a sole plate 10, and the toe 1 is connected to the arch body 2 through a passive joint. The arch body 2 includes an upper arch 2-1, an internal movement block 2-3, and a lower arch 2-2. The upper arch Between 2-1 and the internal movement block 2-3 of the arch of the foot and between the internal movement block 2-3 of the arch of the foot and the lower part of the arch of the foot 2-2, a flexible pad 2-4 is provided, and the upper part of the arch of the foot 2-1 is hin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More