

Control method and electronic device
A technology of electronic equipment and control methods, applied in two-dimensional position/channel control, road network navigator, etc., can solve problems such as positioning and navigation difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In the following, the control method and the electronic device according to the embodiments of the present invention will be described in detail with reference to the accompanying drawings.
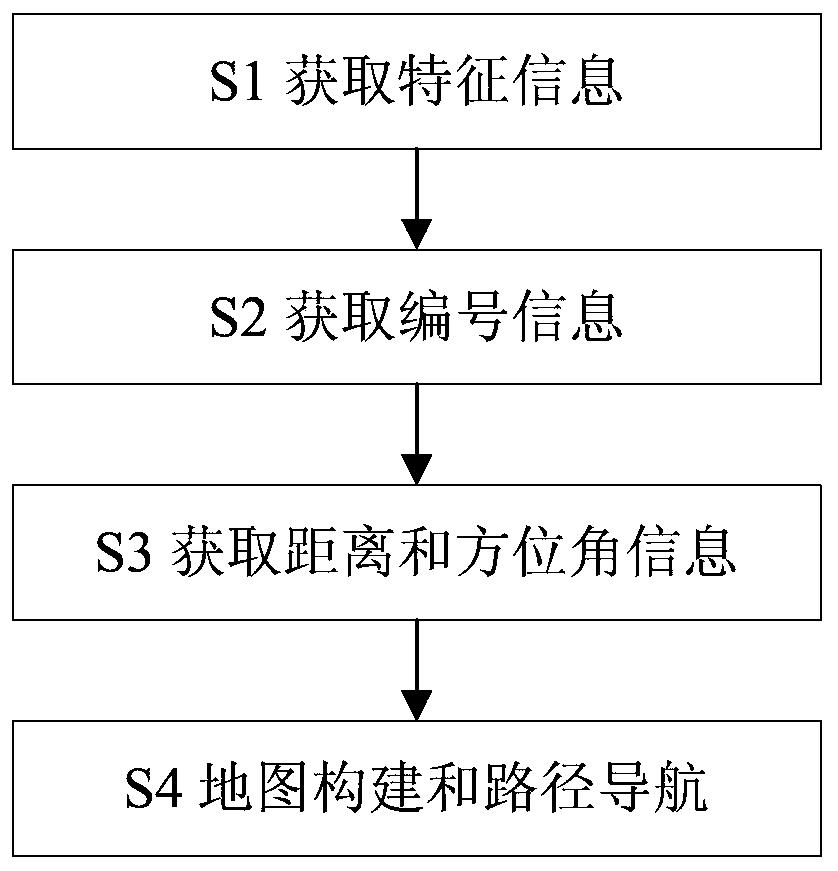
[0028] According to an aspect of an embodiment of the present invention, a control method is provided, which is applied to one or more electronic devices, and the electronic devices are used for map construction and route navigation in an environment, and the control method includes: acquiring the The feature information of the path nodes in the environment, wherein the path nodes are the nodes in the environment that need to select paths or have path turning points; obtain the serial number information of each node in multiple nodes with the same feature information; obtain information about each The distance information and azimuth information of the path node; and, based on the feature information, number information, distance information and azimuth information of the path node,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More