

Target tracking algorithm based on multiple vision in motion capture system
A technology of motion capture and target tracking, which is applied in the field of multi-vision based target tracking algorithms, can solve problems such as inconvenient tracking results, limited applications, and differences in imaging tones, and achieve the effect of solving marker point occlusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
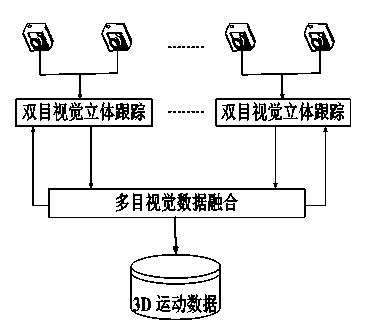
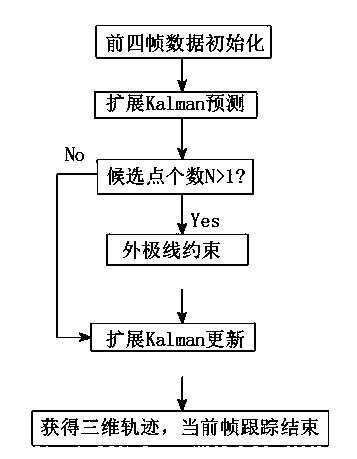
[0017] Such as figure 1 The specific steps of the multi-vision-based target tracking algorithm in the motion capture system shown are as follows: Step 1: Carry out binocular vision stereo tracking, use extended Kalman for prediction, and pick out wrong candidate targets in the prediction area according to the outer epipolar constraints, Specific steps are as follows:
[0018] (1) Use the two-dimensional extended Kalman to predict and track the markers in the two monocular sequence images respectively;
[0019] Suppose the current moment is the moment , , mark point on the The position, velocity, and acceleration of time. During tracking, both 2D...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More