

A 6-ptrt parallel robot with self-calibration function
A 6-PTRT and robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of fewer parallel mechanisms, complex mechanisms, and poor processing, and achieve large working space, high motion safety, and reduced quality. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific implementation manners of the present invention are given below and described in conjunction with the accompanying drawings.
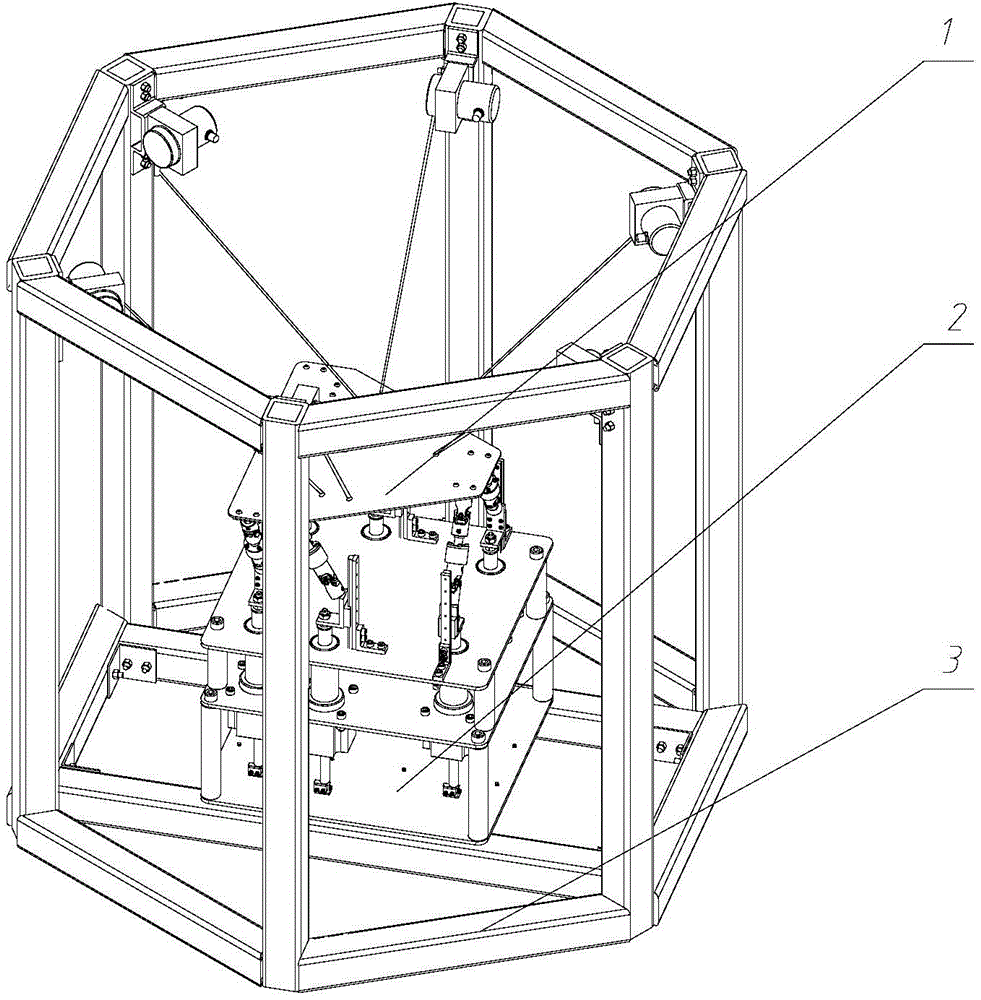
[0017] to combine figure 1 , a 6-PTRT type parallel robot mechanism of the present invention is mainly composed of a six-degree-of-freedom motion platform 1, a driving device 2, and a detection device 3. The six-degree-of-freedom motion platform 1 can completely position objects in space, and also The spatial attitude of the object can be simulated; the driving device 2 is composed of six linear stepper motors and zero position detection, and is mainly used to drive the movement of the six-degree-of-freedom platform; the calibration device 3 detects the pull wires on the six corners of the regular hexagonal truss The sensor obtains the actual position and attitude of the moving platform through kinematics.
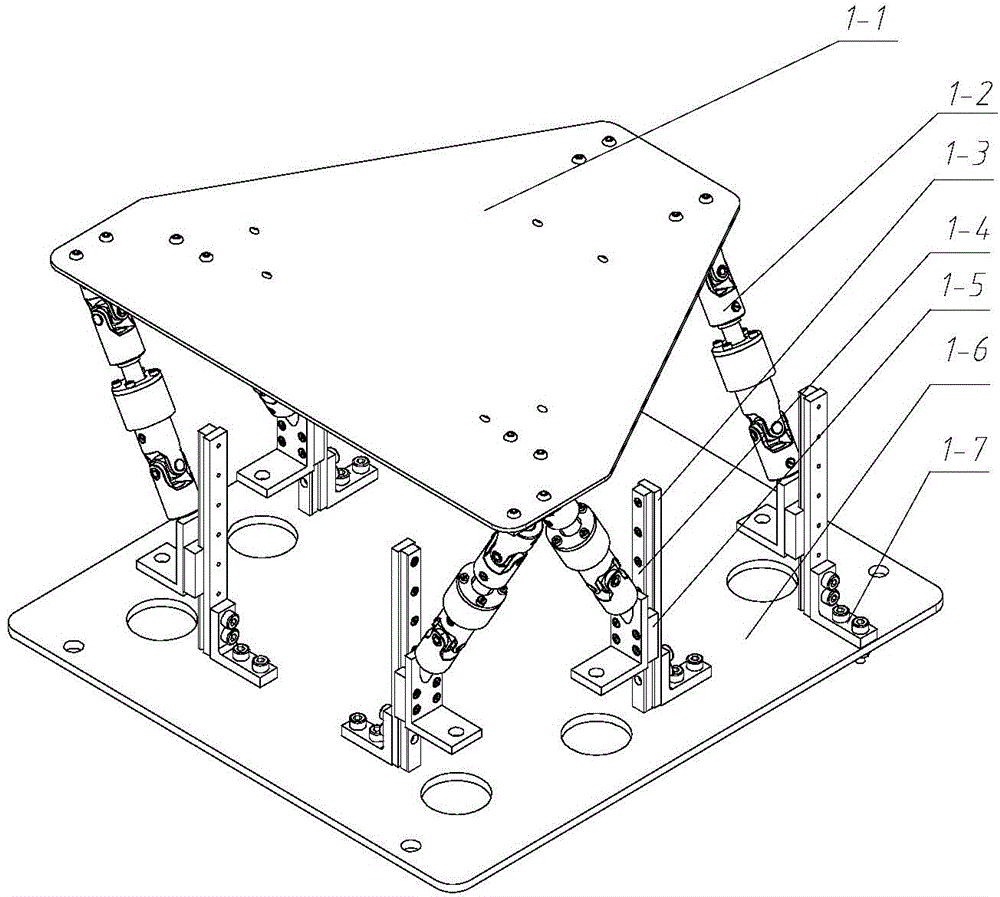
[0018] to combine figure 2 The six-degree-of-freedom motion platform 1 mainly includes a dynamic platform 1-1, a linkage me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More