

Redundant gyroscope fault location method based on zero spatial vector autonomous optimization selection
A technology of zero space vector and redundant gyroscopes, which is applied in the direction of measuring devices and instruments, can solve the problems of large difference in balance coefficients of the same group, poor autonomy of parameter determination, misjudgment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
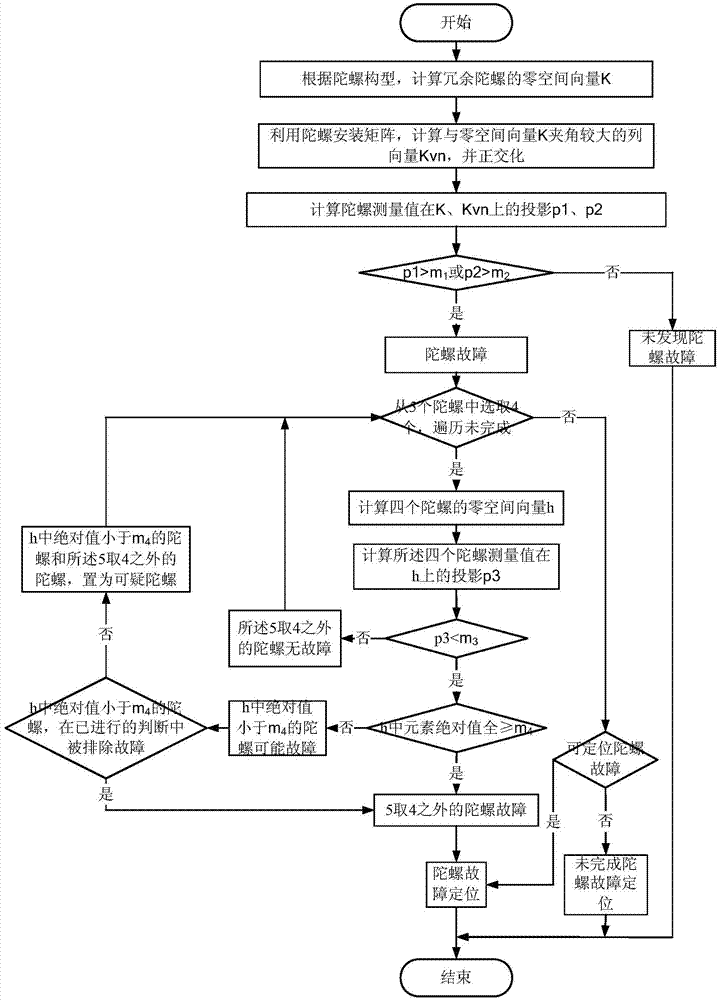
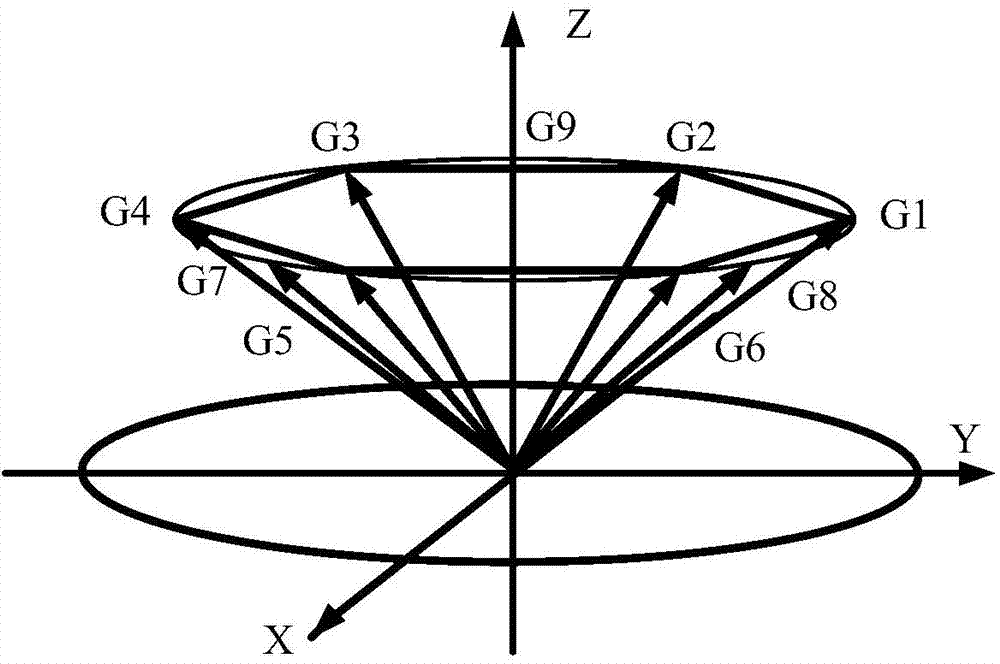
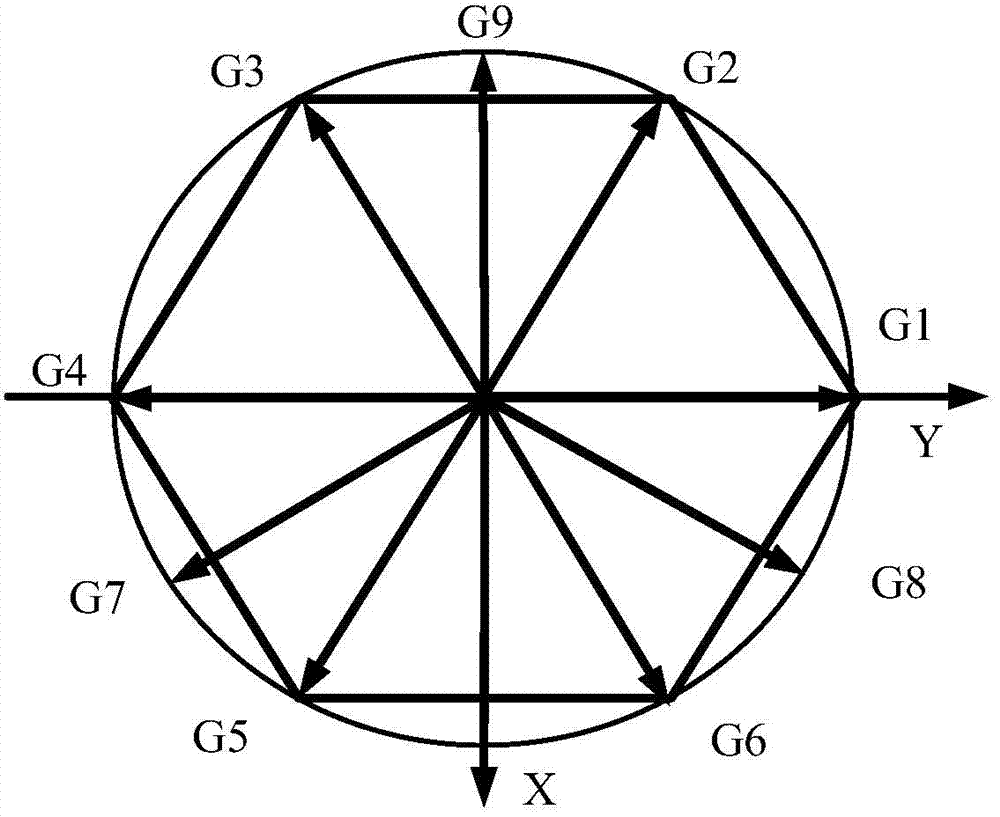
[0064] Taking a spacecraft equipped with 9 gyroscopes as an example, the gyroscope fault judgment and positioning method of the present invention will be introduced below. The spacecraft gyro is installed as figure 2 , image 3 shown.
[0065] Mounting vectors for 9 tops
[0066] G1:O 1 =[0.00000000,0.81649603,0.57735105];
[0067] G2:O 2 =[-0.70710630,0.40824801,0.57735105];
[0068] G3:O 3=[‐0.70710630,‐0.40824801,0.57735105];
[0069] G4: O 4 =[0.00000000,‐0.81649603,0.57735105];
[0070] G5: O 5 =[0.70710630,‐0.40824801,0.57735105];
[0071] G6: O 6 =[0.70710630,0.40824801,0.57735105];
[0072] G7: O 7 =[0.40824801,‐0.70710630,0.57735105];
[0073] G8:O 8 =[0.40824801,0.70710630,0.57735105];
[0074] G9:O 9 =[-0.81649603,0.00000000,0.57735105];
[0075] take b GyroNorm =3° / h, m GyroFault =13.
[0076] Using G1, G2, G3, G7, G8, consider that the gyro constant drift is 50° / h, -3° / h, -3° / h, -3° / h, -2° / h respectively.
[0077] ω=[0.00026398 -0.00000600 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More