

Co-location method of AUVs (Autonomous Underwater Vehicles) in curvilinear motion state based on polar coordinate system
A polar coordinate system and co-location technology, applied in the directions of measuring devices, instruments, surveying and navigation, etc., can solve the problem that distance information cannot describe the motion state of AUV well.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
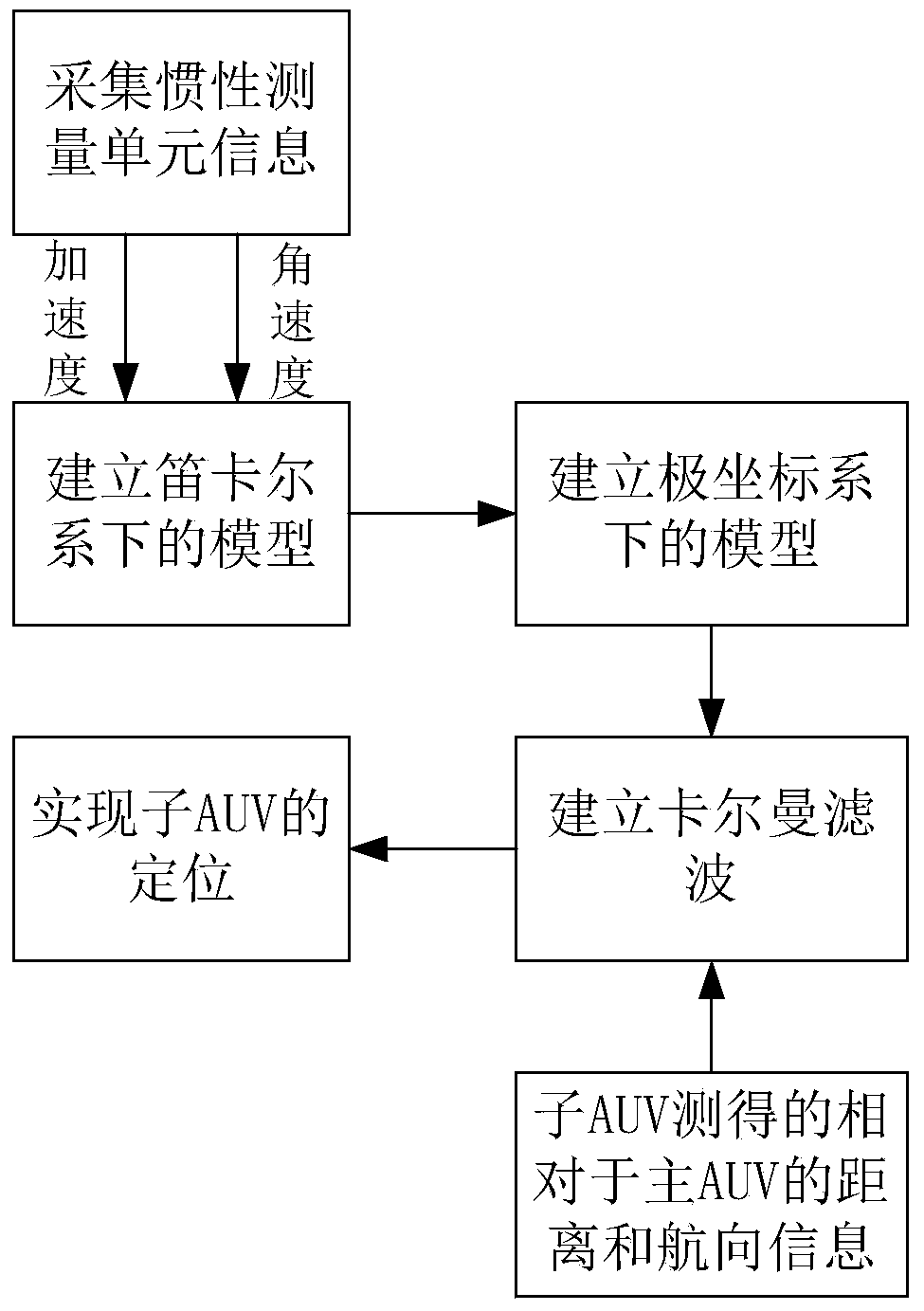
[0055] The present invention will be further described in detail below in conjunction with the accompanying drawings.
[0056] The new co-location algorithm based on the polar coordinate system under the AUV curve motion state includes the following steps:
[0057] Step 1: Collect acceleration and angular velocity information measured by an inertial measurement unit (Inertial Measurement Unit, IMU).
[0058] Step 2: Use the acceleration information and angular velocity information measured by the IMU to integrate the velocity and heading information of the carrier AUV, and use this information to establish the system equation of the AUV in the traditional Cartesian coordinate system.
[0059] Step 3: Using the conversion relationship between the polar coordinate system and the Cartesian coordinate system in step 2, the system equation of the AUV in step 2 is transformed into polar coordinates.
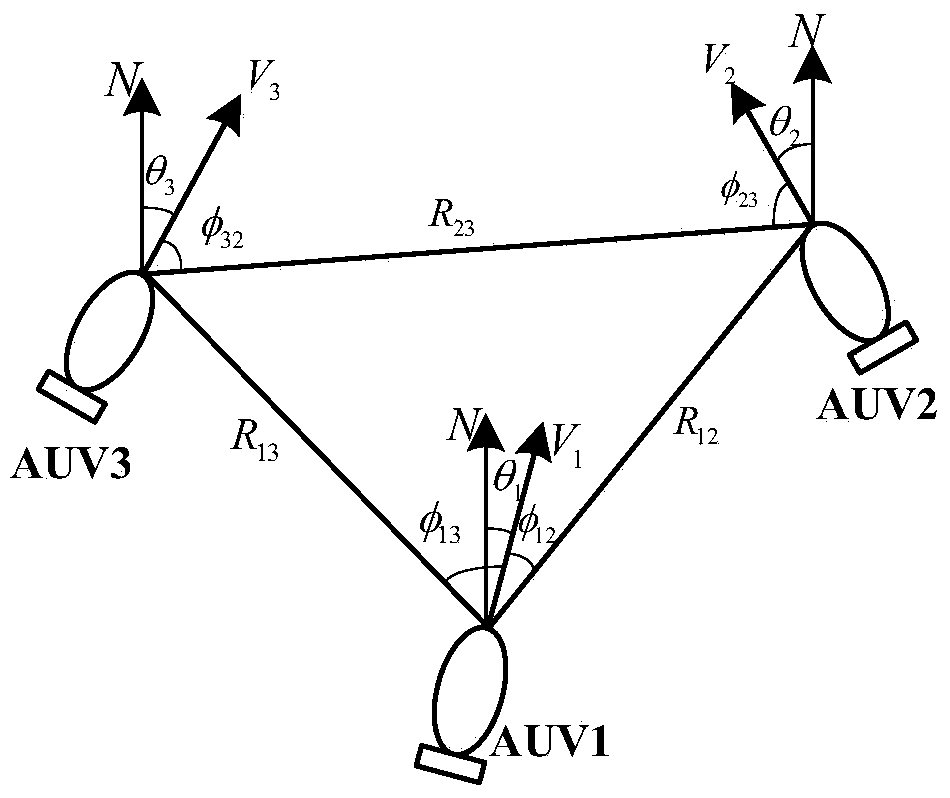
[0060] Step 4: Collect the distance and orientation information of the sub-AUV re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More