

Calculating method for three-dimension scanning point cloud real-time normal vectors
A technology of 3D scanning and normal vector, applied in computing, image data processing, 3D modeling, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
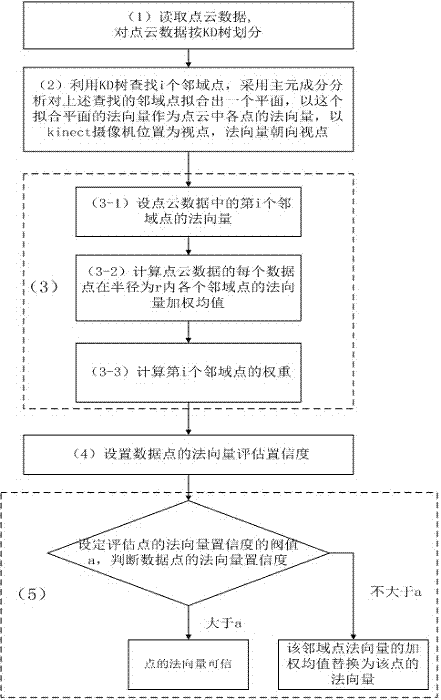
[0048] A method for calculating real-time normal vectors in a three-dimensional scanning point cloud of the present invention, such as figure 1 As shown, the steps are:
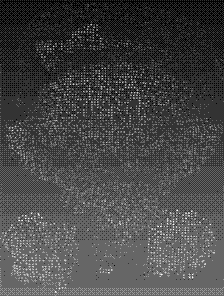
[0049] (1). Use the kinect camera for physical scanning, such as figure 2 As shown, read point cloud data, such as image 3 shown. , divide the point cloud data according to the KD tree, and obtain k neighborhood points of each point cloud data;
[0050] (2). For each point of the point cloud data, use the KD tree of the point cloud data to find i neighbor points, where The value of is a positive integer in the interval [5-20], where, According to the principal component analysis (PCA), a plane is fitted to the above-mentioned searched neighborhood points, and the normal vector of the fitted plane is used as the normal vector of each point of the point cloud data, and the posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More