

System and method for controlling robot
A control system and robot technology, applied in the field of robotics, can solve problems such as wrong direction judgment, movement direction error, deviation, etc., to achieve the effect of preventing deviation, eliminating the interference of body tilt, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the embodiments of the present invention will be explained and described below in conjunction with the drawings of the embodiments of the present invention, but the following embodiments are only preferred embodiments of the present invention, not all of them. Based on the examples in the implementation manners, other examples obtained by those skilled in the art without making creative efforts all belong to the protection scope of the present invention.
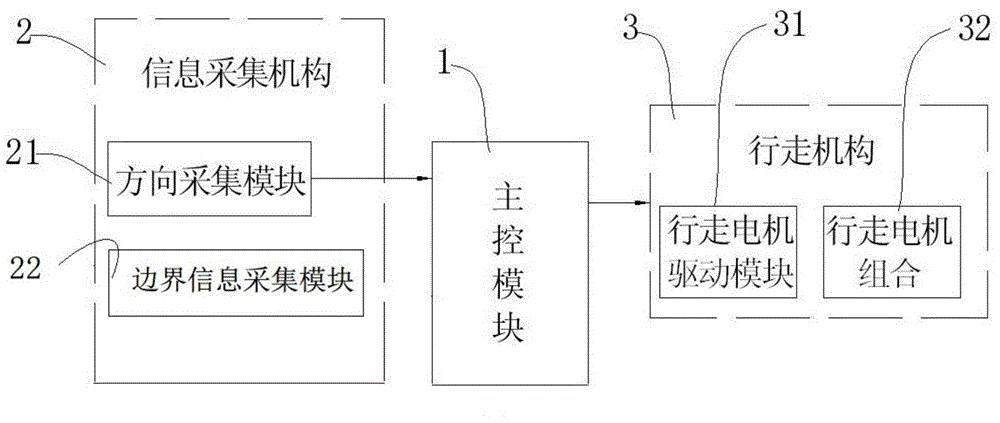
[0025] refer to figure 1 , a control system of a robot, comprising a main control module 1, a walking mechanism 3 and an information collection mechanism 2 connected to the main control module, the information collection mechanism 2 includes a direction collection module 21 for collecting robot direction information, and the direction collection module 21 includes The magnetic field induction sensor that collects the geomagnetic field data, the direction acquisition module also includes the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More