

Double-rotor-wing unmanned plane
A UAV and dual-rotor technology, applied in the direction of rotorcraft, motor vehicles, aircraft, etc., can solve the problems of unfavorable control model simplification and increased difficulty, and achieve the advantages of small structural design restrictions, large lift force, and low research cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
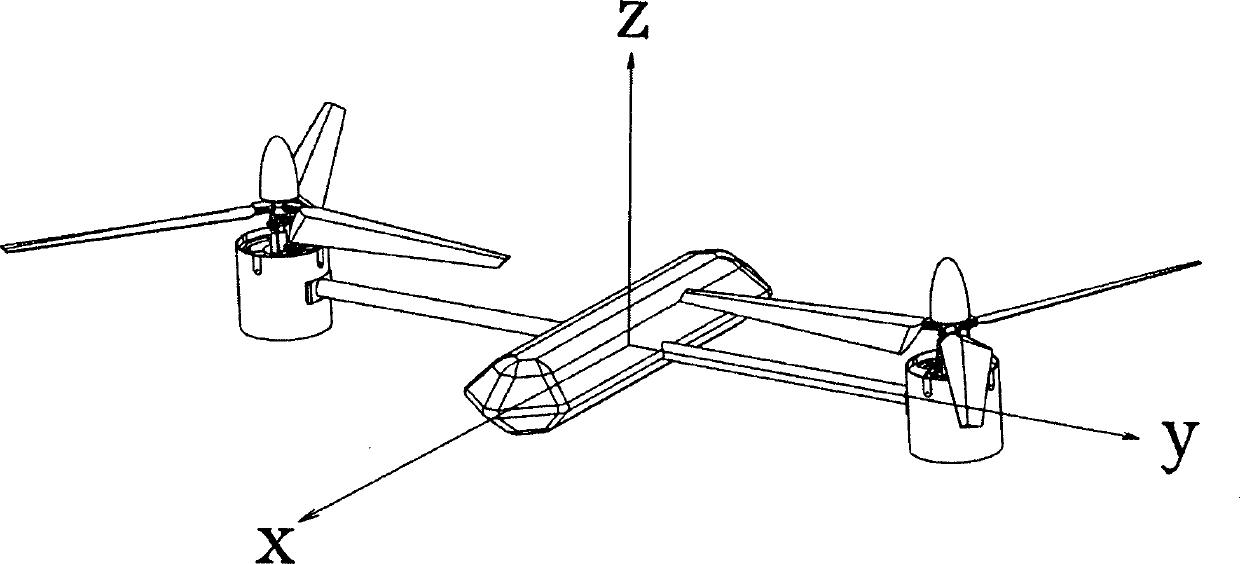
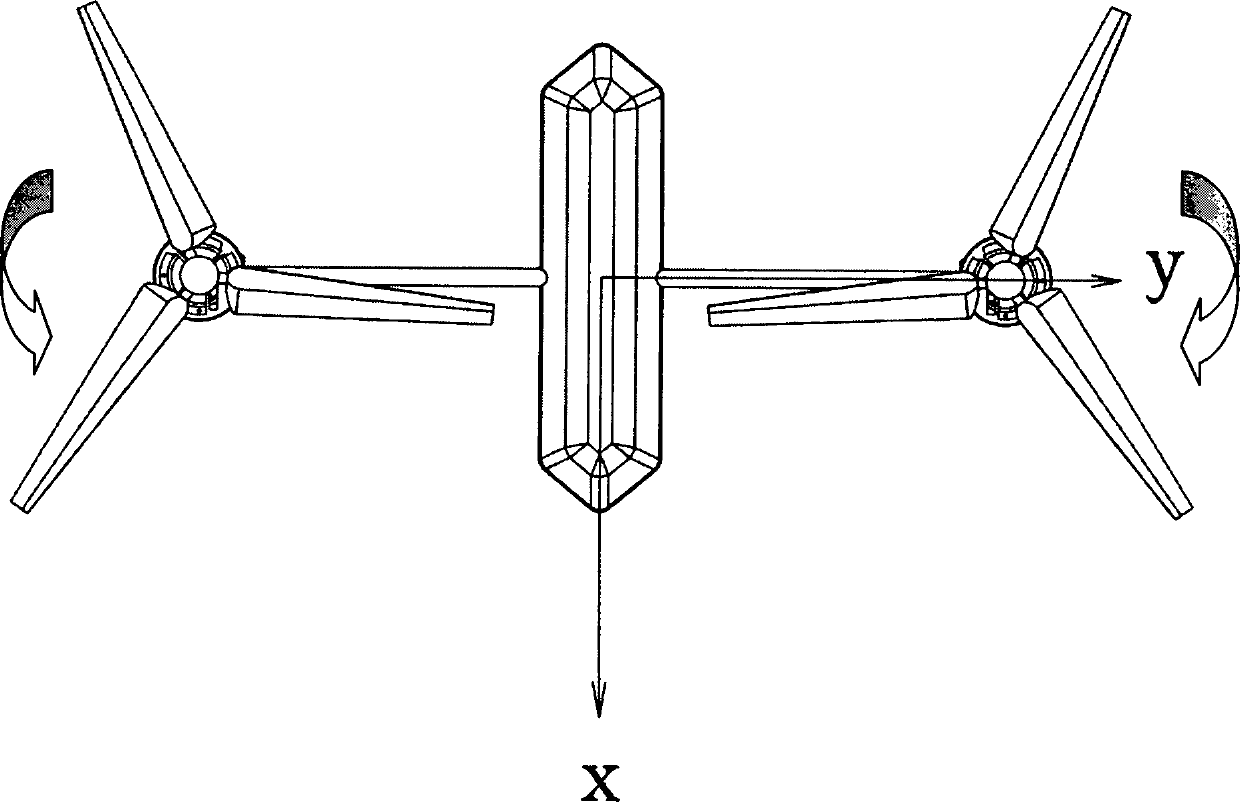
[0028] The present invention is a dual-rotor layout, and its carrier coordinate system is as follows: figure 1 . The rotors are symmetrically distributed on both sides of the fuselage, and the direction of rotation is as follows: figure 2 shown. Its flight control principle is similar to that of a quadrotor UAV. The specific method is: through the control system to control the three angles of the UAV's heading angle, roll angle and pitch angle, the attitude of the UAV can be completely controlled, so that the unmanned The machine as a whole and the horizontal plane generate a controllable inclination angle along the specified direction. The lift force perpendicular to the body of the UAV is therefore decomposed into a lift force perpendicular to the ground and a component force advancing horizontally. In addition to the altitude control, there are four c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More