

Blue sheep simulation mechanical foot
A technology of mechanical feet and mechanical interfaces, applied in the field of mechanical design, can solve problems such as walking difficulties, and achieve the effect of simple functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
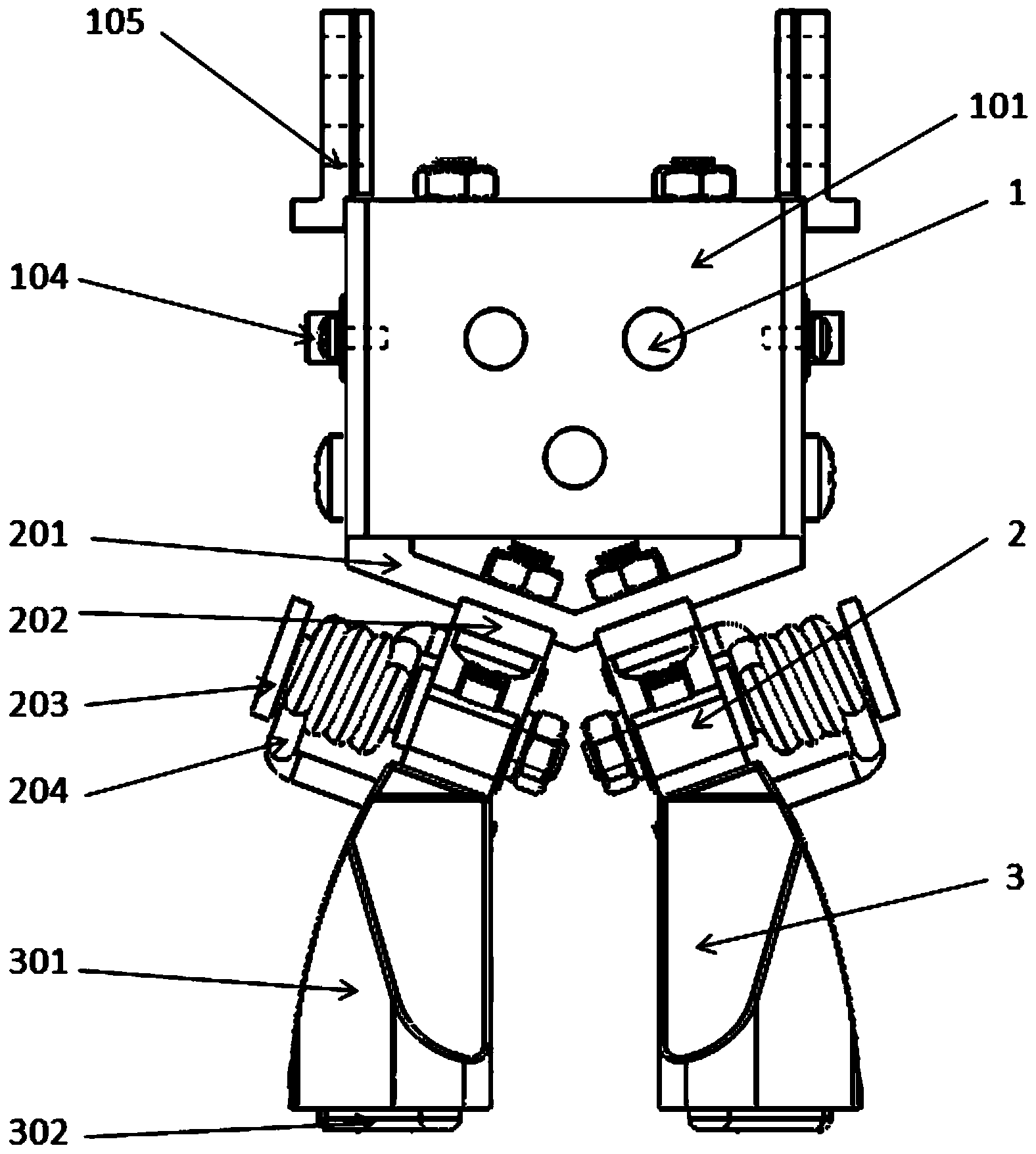
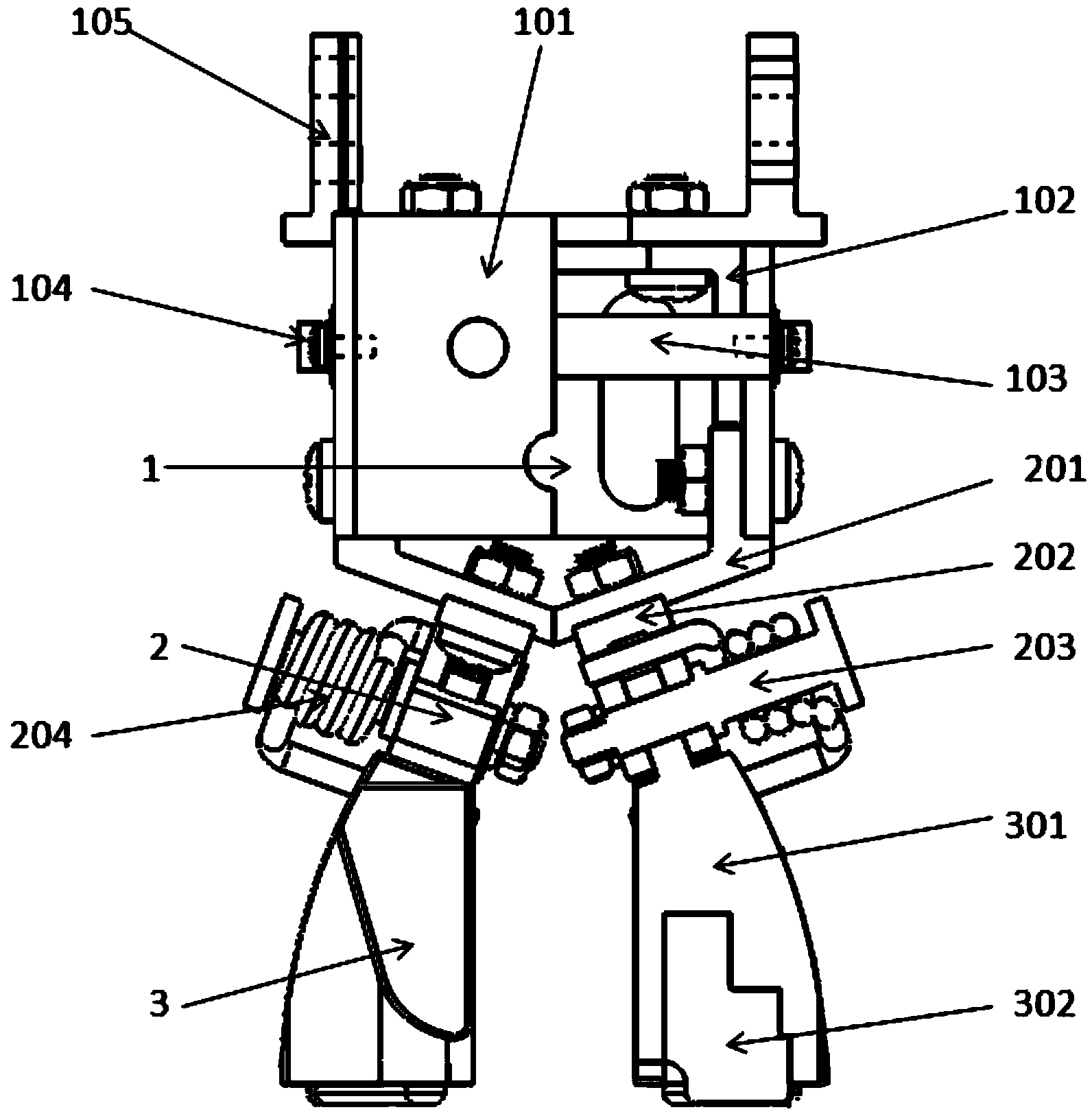
[0032] The present invention is a kind of rock sheep mechanical foot device, such as figure 1 , figure 2 , image 3 , Figure 4 As shown, including mechanical interface 1, ankle joint 2 and sole 3;
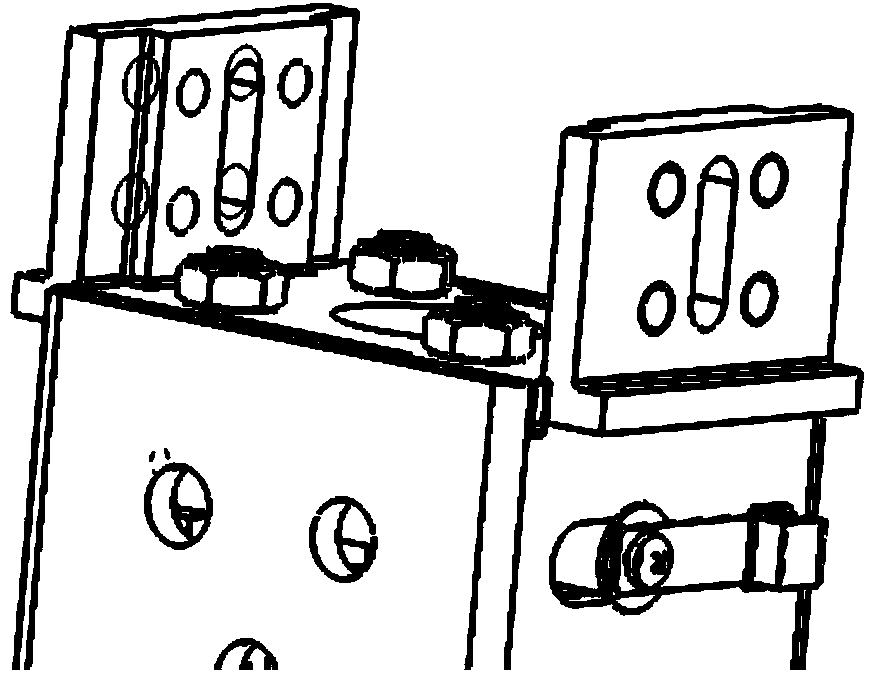
[0033] mechanical interface 1 such as Figure 5 As shown, it includes an interface shell 101 , an interface inner shell 102 , a quick-change lever 103 , a spring buckle 104 and a robot leg 105 .
[0034] The two sides of the interface shell 101 are fixedly connected with the mechanical foot and ankle joint by screws, and there are straight slots on both sides, the quick-change lever 103 can move in the slot, and there are spring buckle slots on both sides, and the spring buckle 104 can be snapped in and fixed. It can also be dismantled and disassembled; the interface inner shell 102 is set in the interface shell 101, and there are corresponding notc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More