

Feature extraction method and device
A feature extraction and feature point technology, applied in the field of image matching, can solve the problems of large differences in shooting angles and unsatisfactory image matching effects, etc., and achieve low pickiness, avoid adverse effects, and widely applicable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] The goal of image matching is to find the similarities in the images to be matched that satisfy certain objective constraints. For many tasks that need to obtain certain information through images, image matching is a key and basic step. For example, recovering 3D scenes from stereo image pairs, image retrieval, change detection, and target recognition in security facilities, etc., due to the different imaging characteristics of different sensors, the required image matching algorithms are also different. The technical solutions in the embodiments of the present invention are mainly applicable to common optical images in the field of photogrammetry and computer vision. In this field, image matching can be roughly divided into two types: one type has no or only a small amount of prior information, Matching with relatively few matching points is usually used to establish the initial relative relationship between images; one type is matching with very dense matching points ...
Embodiment 2
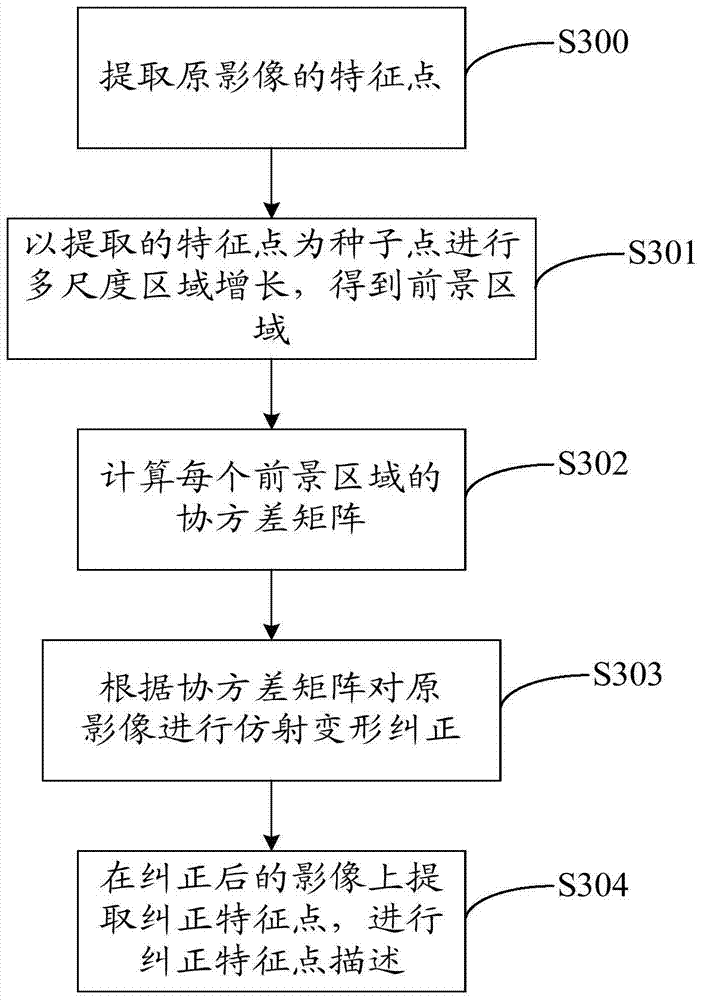
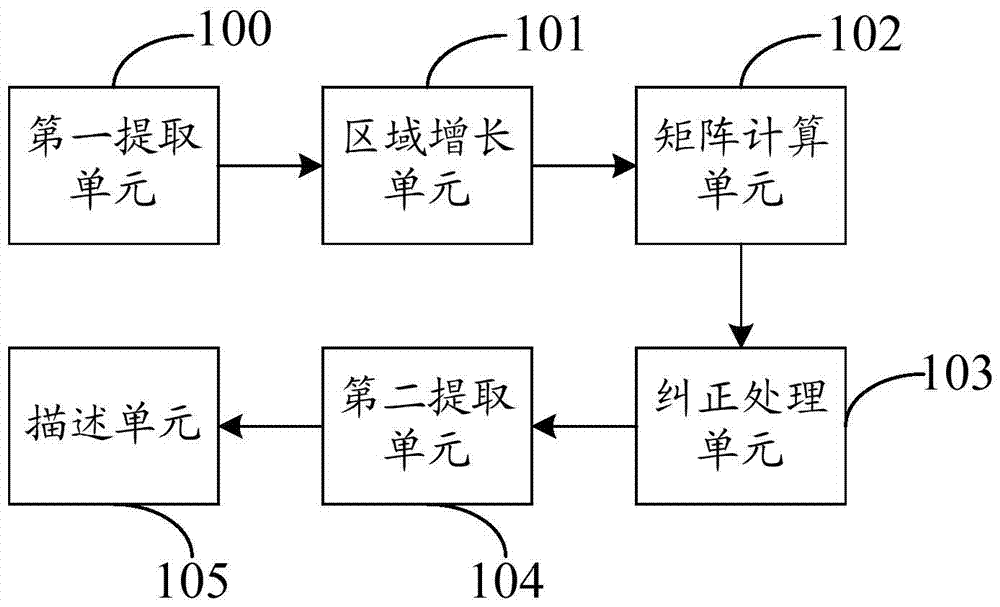
[0135] Such as image 3 As shown, the embodiment of the present invention discloses a feature extraction device, including: a first extraction unit 100: used to extract the feature points of the original image; a region growing unit 101: used to assign each feature point more than two different sizes Scale window, the scale window of each feature point is the area obtained with each feature point as the center; in each scale window, the feature point as the center of the scale window is used as the seed point for region growth, and each feature point corresponds to More than two foreground areas, the number of foreground areas corresponding to each feature point is equal to the number of scale windows assigned to each feature point; matrix calculation unit 102: used to calculate the covariance matrix of each foreground area; correction processing unit 103: used to perform affine deformation correction on the image according to the covariance matrix of the foreground area; the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More