

Variable-rigidity biomimetic falcula mechanism and falcula components thereof
A claw and component technology, applied in the field of intelligent bionic robots, can solve problems such as small rigidity adjustment range, robot falling, difficult secondary grasping, etc., to achieve uniform distribution of grasping force, widen the applicable environment, and stable grasping action Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The accompanying drawings disclose, without limitation, the structural schematic diagrams of the preferred embodiments involved in the present invention; the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
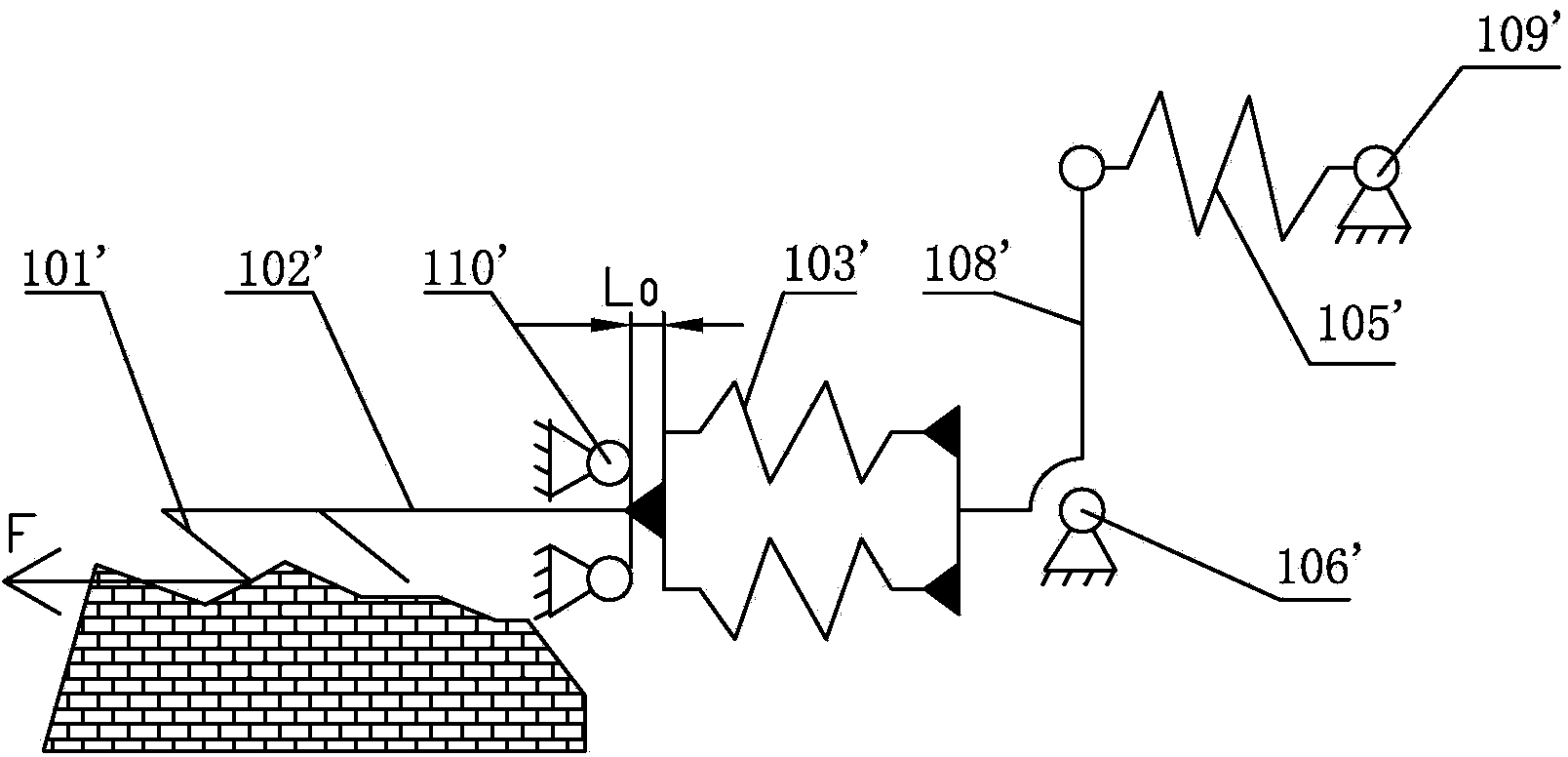
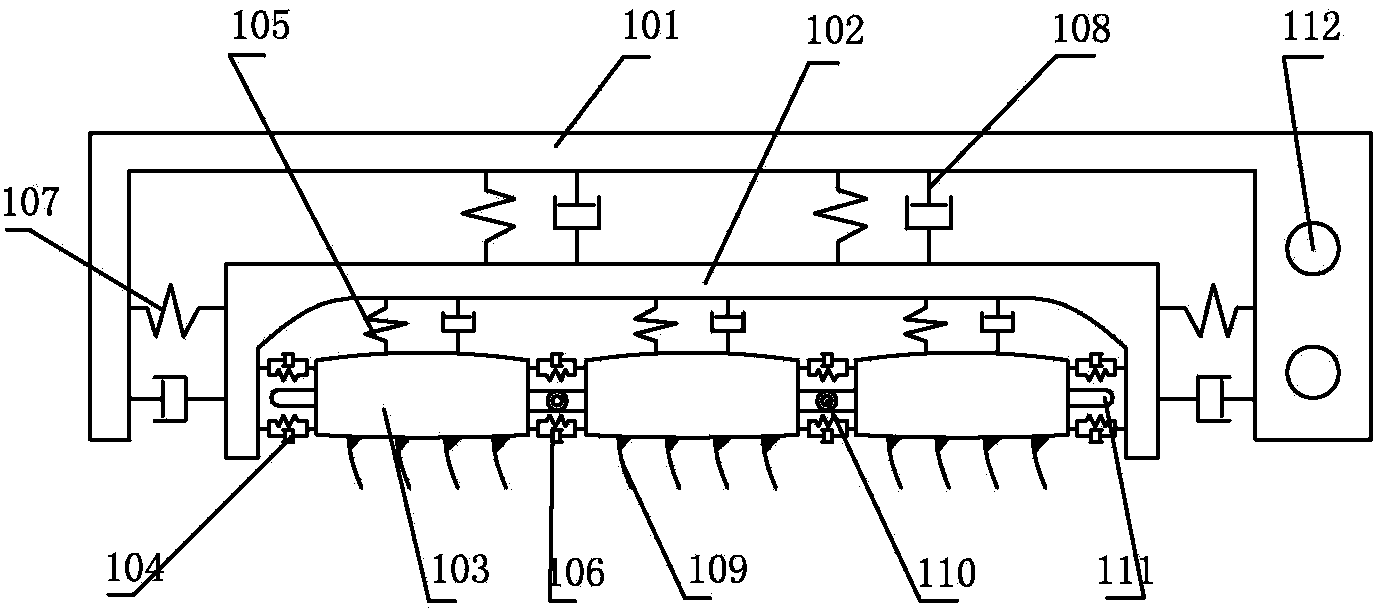
[0028] like image 3As shown, the claw assembly of the present invention includes a claw installation head and a claw elastically connected to the claw installation head; the claw includes a micro claw connector and more than one micro claw unit, and each micro claw unit Each micro-claw unit is sequentially connected in series in a linear shape, and the outer end face of the micro-claw unit at the end is provided with a limit column. Between two adjacent micro-claw units, each micro-claw unit and the micro-claw unit The adjacent end faces of the connecting head are elastically connected, and the elastic connection stiffness between the components of the claw is less than the elastic connect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More