

Spring steel sheet type variable-rigidity gripper assembly and gripper mechanism thereof
A technology of spring steel sheet and variable stiffness, which is applied in the direction of motor vehicles, transportation and packaging, etc. It can solve the problems of small stiffness adjustment range, inconvenient adjustment, difficult secondary grasping, etc., and achieves uniform grasping force distribution and parameter adjustment range Large, stable gripping action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The accompanying drawings disclose, without limitation, the structural schematic diagrams of the preferred embodiments involved in the present invention; the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
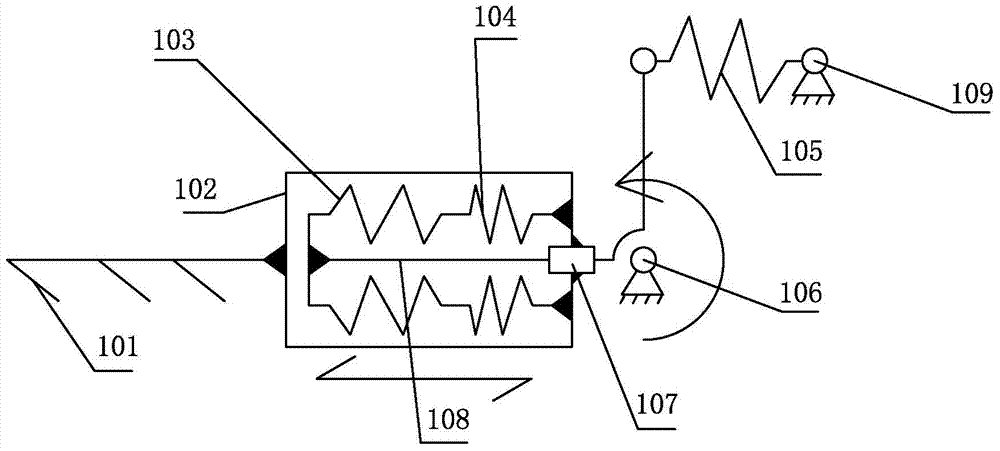
[0035] like image 3 , 4 As shown, the claw assembly of the present invention includes three parts: the claw main body, the connecting frame and the series elastic connection group; wherein:
[0036] The claw main body, such as Figure 5 As shown, it is a square frame structure, the lower part is provided with a claw tip 101, and the right side of the square frame is provided with a horizontally arranged opening; the horizontally arranged opening and the inner wall of the box are both used as a guiding working surface for the horizontal movement of the connecting frame;
[0037] The set of elastic connections in series, such as Figure 6 Shown, comprise first spring 103, second spring 10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More