

Rigidizable inflatable capturing hand
An inflatable, airbag technology, applied in the directions of manipulators, program-controlled manipulators, joints, etc., can solve the problem of increasing the launch volume and mass of the capture mechanism and its control system, increasing the complexity and operation difficulty of the system, and increasing the capture mechanism and the captured Capture target damage and other problems, to achieve the effect of increasing the total capture force and friction force, uniform distribution of the capture force, and low difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
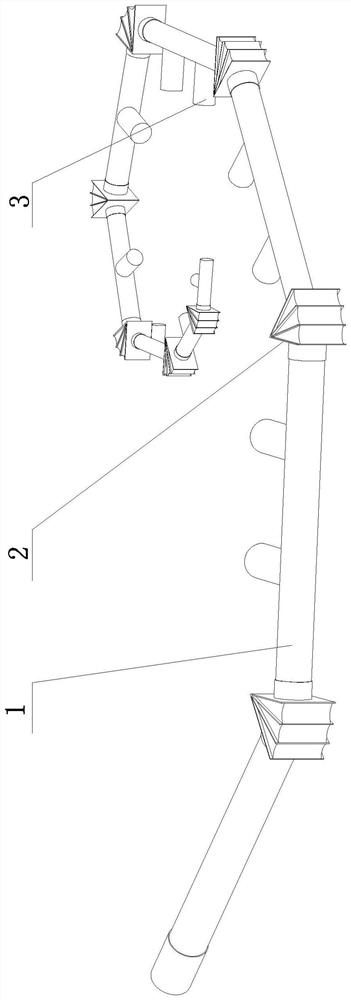
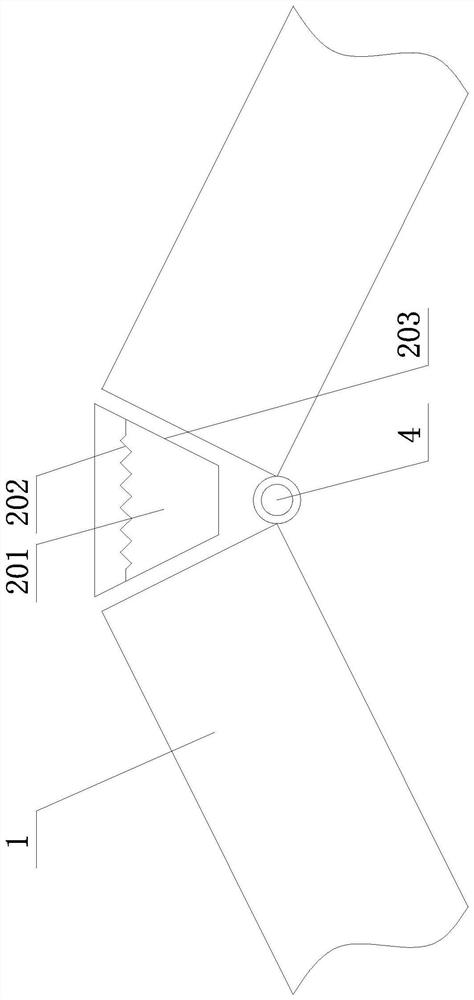
[0030] Specific implementation mode one: as figure 1 As shown, this embodiment discloses a rigid inflatable catcher, which includes multi-section inflatable knuckles 1, multiple inflatable joints 2 and multiple tightening airbags 3; the multi-section inflatable knuckles 1 are arranged in sequence , the inner ends of the adjacent end surfaces of every two adjacent inflatable knuckles 1 are connected by a hinge 4, and an inflatable joint 2 is fixedly connected between each two adjacent inflatable knuckles 1, and the outer surface of each inflatable knuckle 1 The inner side is connected with a tightening air bag 3, and the multi-section inflatable knuckles 1 are rigid inflatable knuckles.
[0031] Furthermore, if figure 1 As shown, the inflatable joint 2 is in the shape of a bellows.
[0032] Furthermore, if figure 1 As shown, the length of the multi-section inflatable knuckles 1 is equal in length, or decreases or increases from the rear end to the front end; the outer wall d...
Embodiment 1
[0041] This embodiment discloses a rigid inflatable catcher; it includes nine inflatable knuckles 1, eight inflatable joints 2 and ten tightening airbags 3; the nine inflatable knuckles 1 are from the rear end to the front end Decreasing in size, the inner ends of the two adjacent end surfaces of every two adjacent inflatable knuckles 1 are connected by a hinge 4, and an inflatable joint 2 is fixedly connected between every two adjacent inflatable knuckles 1, and nine inflatable knuckles 1 From the rear end to the front end, it is defined as: the first inflatable knuckle, the second inflatable knuckle, the third inflatable knuckle, the fourth inflatable knuckle, the fifth inflatable knuckle, the sixth inflatable knuckle , the seventh inflatable knuckle, the eighth inflatable knuckle and the ninth inflatable knuckle, the inner sides of the outer surfaces of the second inflatable knuckle and the third inflatable knuckle are respectively connected with two tightening airbags 3 A ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More