

Zero calibrating method for two-degree-freedom high speed parallel robot
A zero-point calibration and robot technology, which is applied in the direction of instruments, manipulators, and mechanical devices, can solve problems such as stoppage and zero-point loss, achieve high calibration accuracy, overcome uncertain factors, and the calibration process is simple and convenient.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
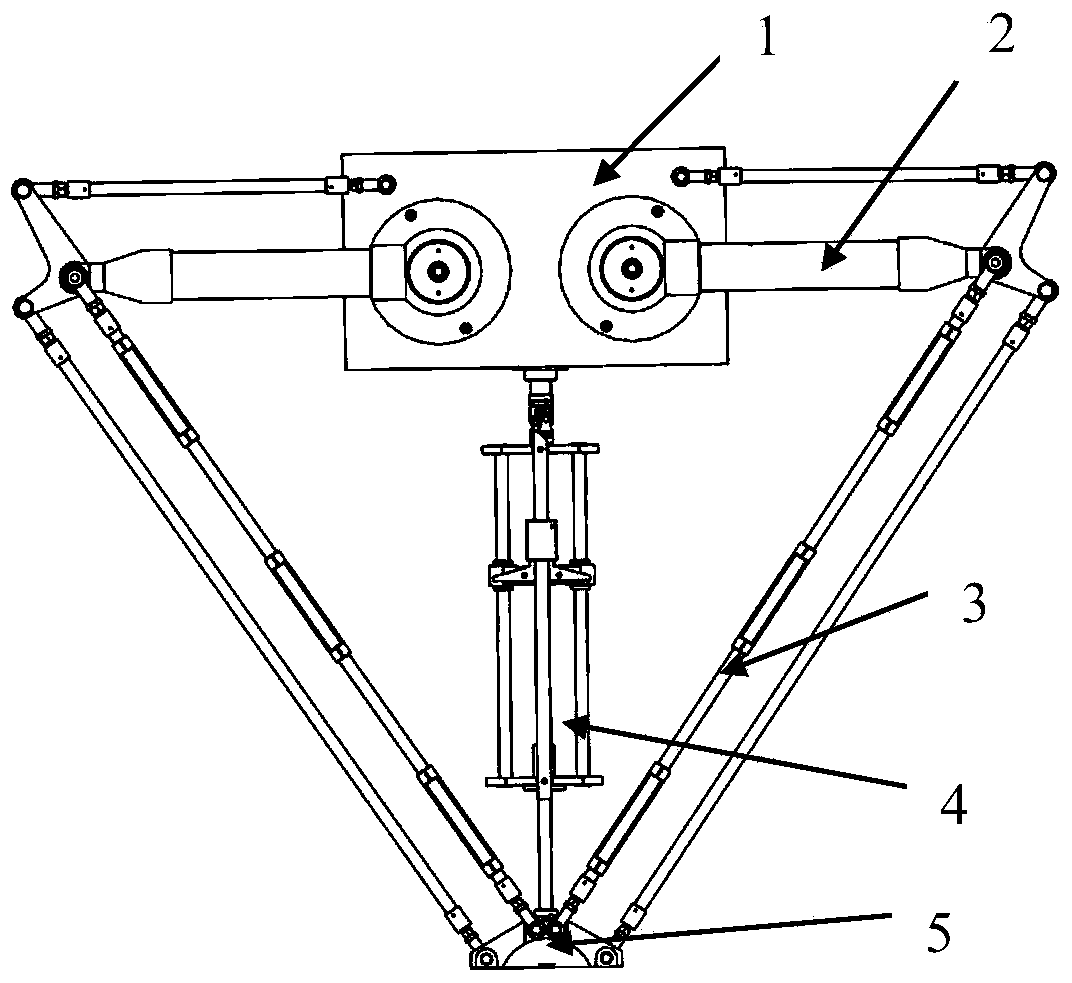
[0028] see figure 1 , the two-degree-of-freedom high-speed parallel robot consists of a fixed platform 1, an end platform 5, and two kinematic branch chains with the same structure, and each kinematic branch chain includes two parts: the active arm 2 and the driven arm 3. In order to realize the calibration method of the present invention, it is necessary to install a scaled telescopic ruler 4 between the fixed platform 1 and the end platform 5, and one end of the telescopic ruler 4 is fixedly connected to the fixed platform 1 through a cross shaft universal coupling , and the other end is fixedly connected to the end platform 5 through a cross shaft universal coupling. In this embodiment, the measurement accuracy of the telescopic ruler is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More