

AGV robot path navigation system
A path navigation and robot technology, applied in the field of robotics, can solve the problems of wrong robot position information, inability to obtain robot offset angle, robot offset RFID center point distance, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
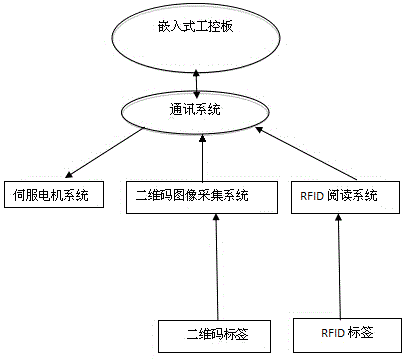
[0022] Such as figure 1 Shown is a structural block diagram of an AGV robot path navigation system, which includes a two-dimensional code label, an RFID label, a two-dimensional code image acquisition system, an RFID reading system, a servo motor system, a communication system and an embedded industrial control board; The two-dimensional code image acquisition system and the RFID reading system respectively read the two-dimensional code label and the RFID label information and upload them to the embedded industrial control board through the communication system, and the embedded industrial control board is passed as follows: Figure 4 The shown method outputs forward or differential speed adjustment or parking adjustment commands to the servo motor system after judgment processing, so that the robot can confirm its own posture in the walking environment and c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More