

Real time following method for robot bend and device thereof
A technology of robots and bending knives, which is applied in the field of robots, can solve problems that affect bending quality and efficiency, reduce bending accuracy, and deform bending workpieces, so as to improve work efficiency and bending quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings.
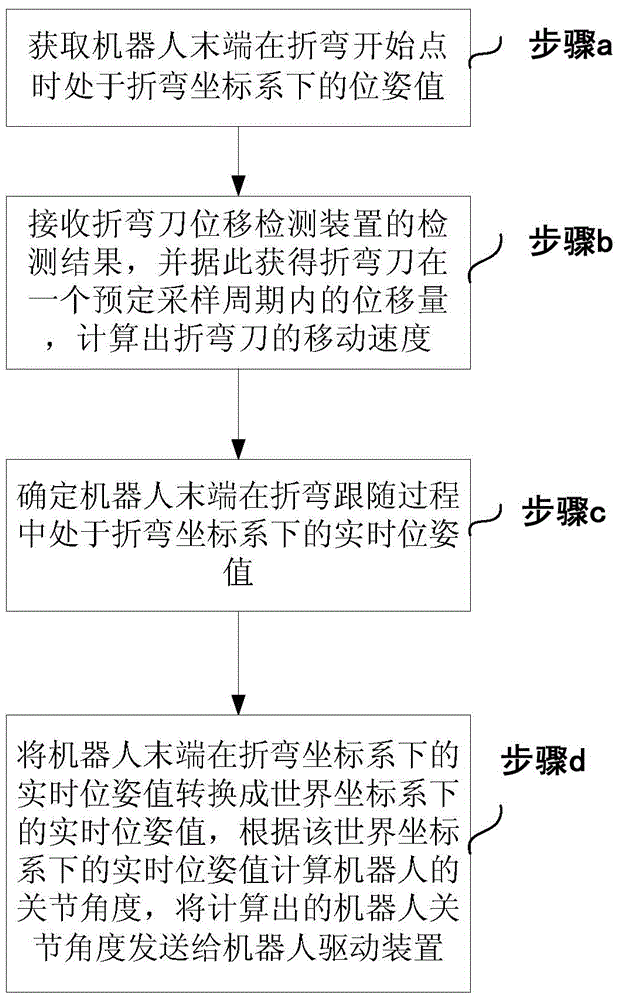
[0029] Please refer to Figure 1 to Figure 4 . The real-time following method of robot bending according to an embodiment of the present invention includes the following steps:
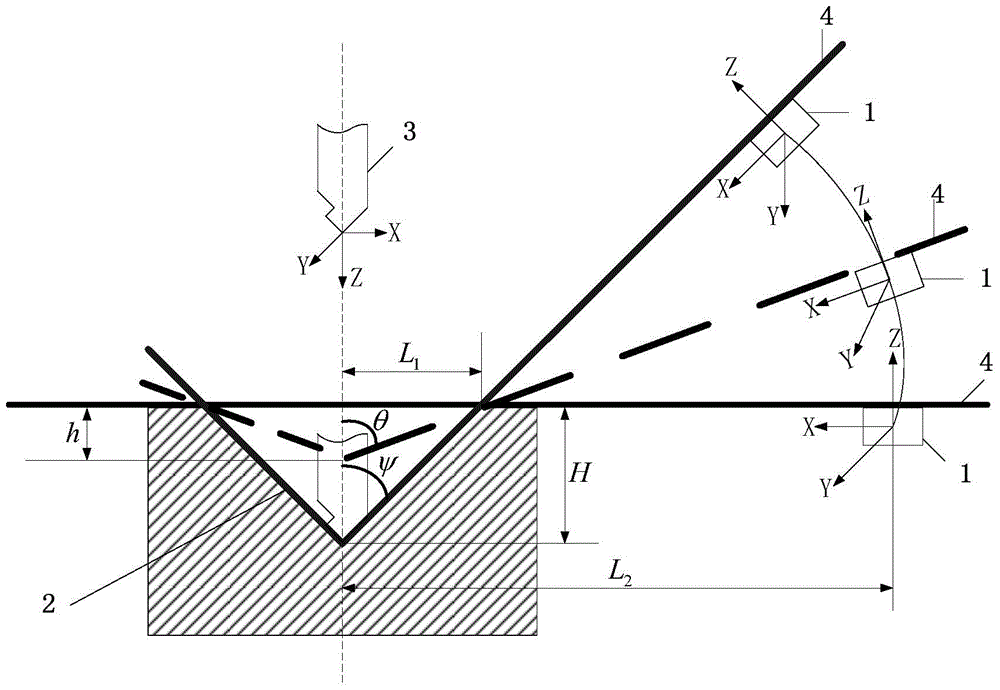
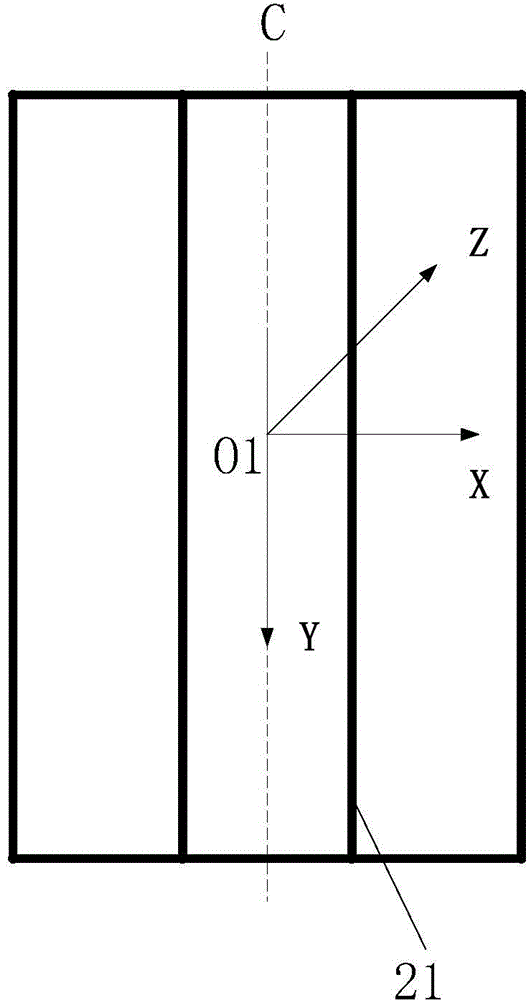
[0030] Step a, obtain the pose value P0(L 2 ,Y 0 ,Z 0 ,A 0 ,0,C 0 ); the bending coordinate system takes the extension direction of the longitudinal centerline C of the mouth 21 of the bending machine sipe 2 as the Y-axis direction, takes the moving direction of the bending knife 3 as the Z-axis direction, and the X-axis direction is defined by The Y-axis direction and the Z-axis direction are determined according to the right-hand rule. The origin of the bending coordinate system is any point on the longitudinal centerline C of the notch 21 of the bending machine; L2 is the distance between the bending start point of the robot and the origin of the bending coordinate system, that is, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More