

A Robot Accuracy Compensation Method for Variable Parameter Error Identification
A technology of precision compensation and robotics, which is applied in the directions of instruments, measuring devices, surveying and navigation, etc., can solve problems such as limited precision, no consideration of the influence of flexibility, and unsatisfactory robot effects, so as to improve calibration accuracy, wide application, and improve Effect of Absolute Positioning Accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be further described below in conjunction with the accompanying drawings.
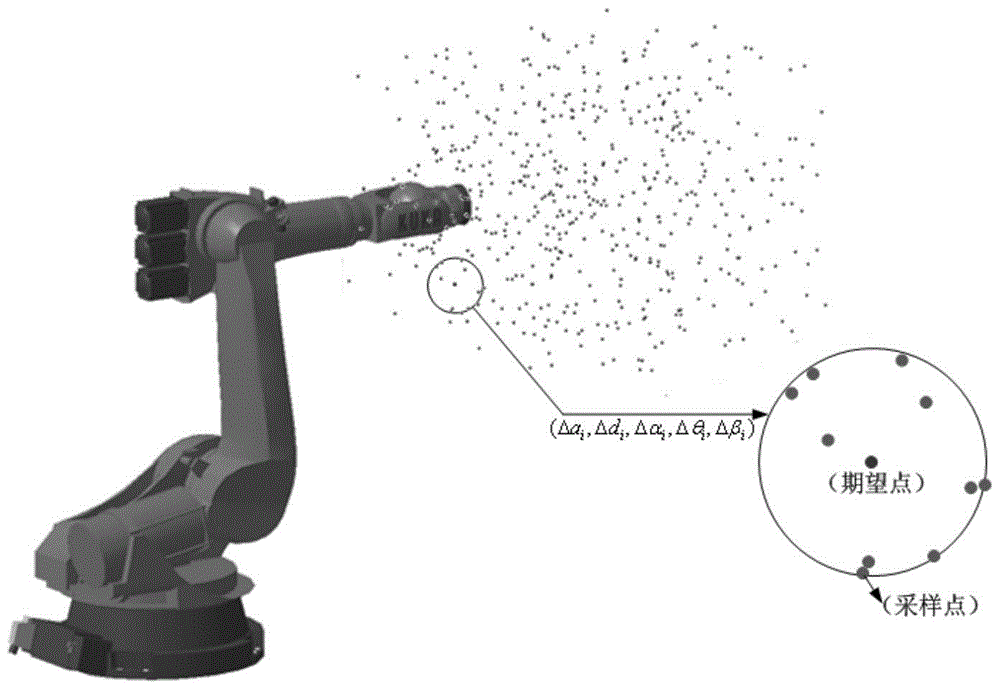
[0070] A robot accuracy compensation method for variable parameter error identification, such as figure 1 shown, including the following steps:
[0071] The first step is to fix the laser tracker on the ground, and use the laser tracker to establish the coordinate system of the robot base and the flange:
[0072] 1) Put the spherical reflector SMR of the laser tracker on the plane of the robot base, move a certain distance along the plane of the base, use the continuous measurement method of the laser tracker to collect a series of points on the distance, and use the built-in The software's fitting plane command and offset command (the offset distance is the SMR radius) fit a plane, which is the robot base plane Baseplane;
[0073] 2) Install an SMR seat on the flange plane of the robot, fix the SMR on the SMR seat, then lock the A2 axis to the A6 axis of the robot, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More