

Mechanical arm DH parameter identification method based on least square method
A least square method and parameter identification technology, applied in the field of robotics, can solve problems such as unsatisfactory absolute positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
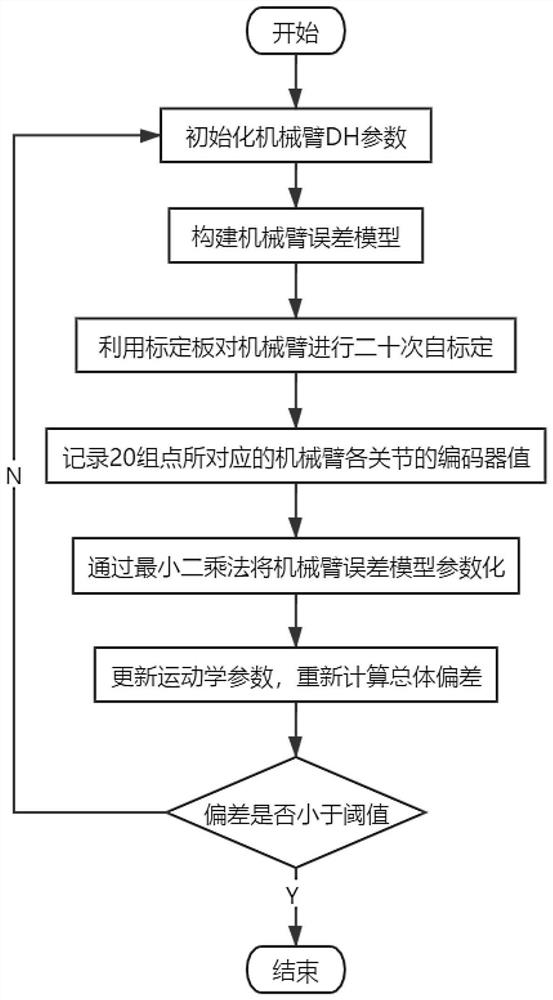
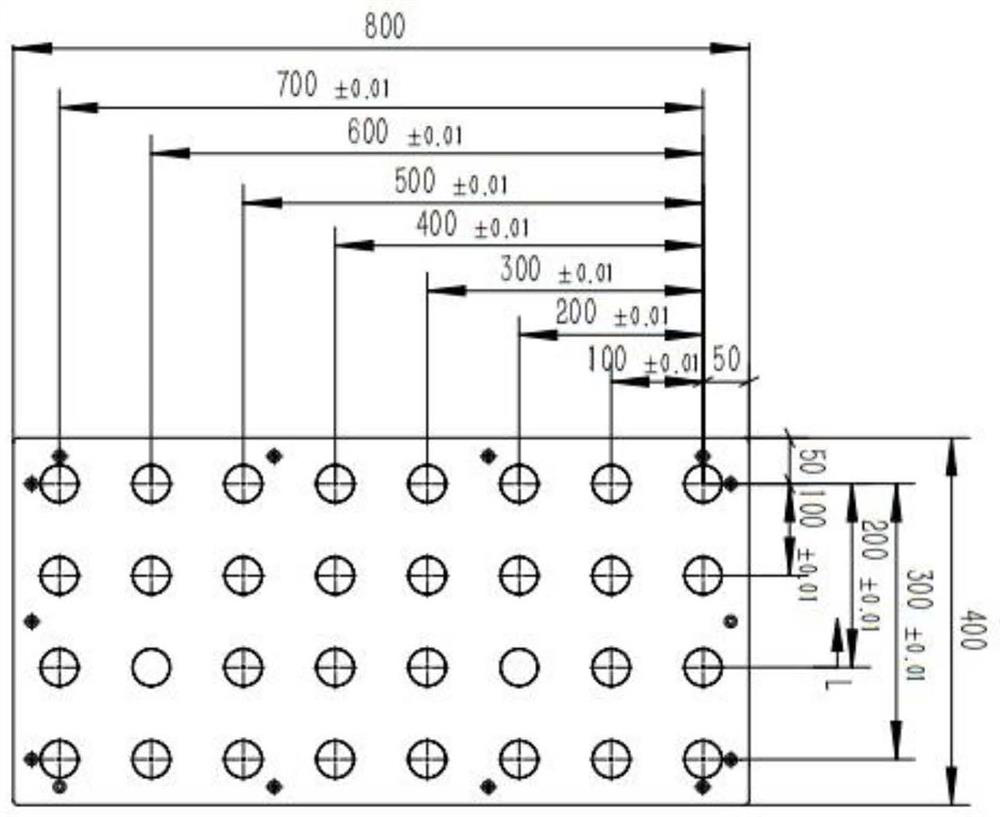
[0036] refer to Figure 1 ~ Figure 4 , which is the first embodiment of the present invention, this embodiment provides a method for identifying DH parameters of a manipulator based on the least squares method, including:
[0037] S1: Determine the initial DH parameters of the manipulator according to the configuration and structural parameters of the manipulator, and construct the error model of the manipulator according to the principle of differential motion.
[0038] What needs to be explained is that the differential motion of the robot is to study the relationship between the small changes in the robot joint variables and the small changes in the robot's hand posture, which can be used to deduce the speed relationship between different components.
[0039] The constructed manipulator error model is as follows:
[0040]
[0041] Among them, d x 、d y 、d z are the differential translations of the manipulator coordinates along the x, y, and z axes (that is, the origin o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More