

A metamorphic wheeled mobile welding robot with controllable mechanism
A welding robot and mechanism-based technology, applied in the field of robotics, can solve the problems of small working space of parallel robots, unsolved problems of industrial robots, and small inertia of end effectors, and achieve the effects of high force and torque, improved stiffness, and good balance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] A controllable mechanism metamorphic wheeled mobile welding robot of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
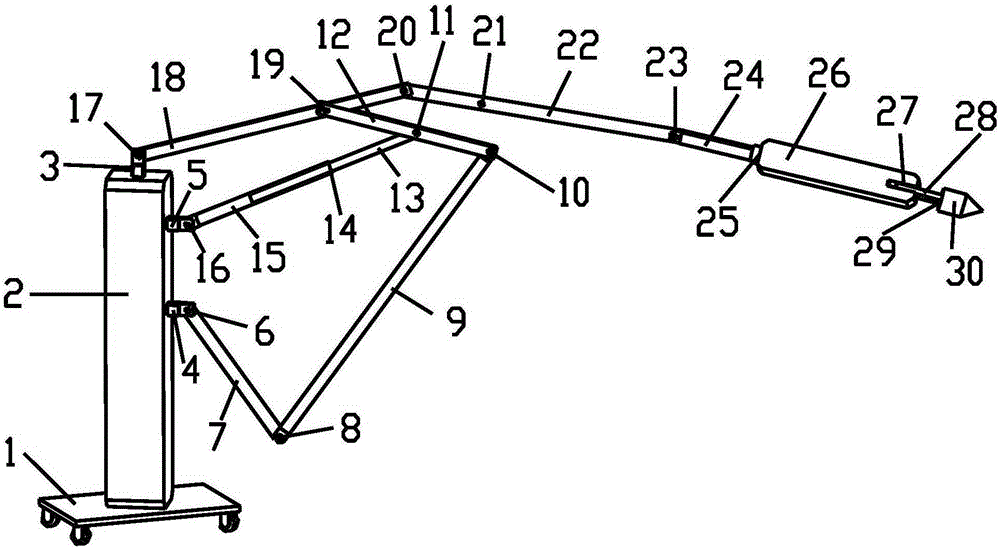
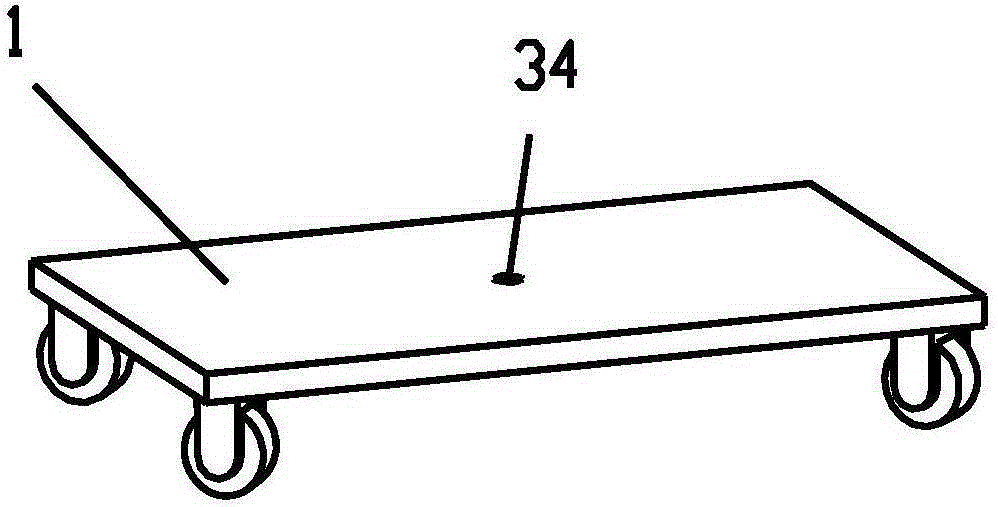
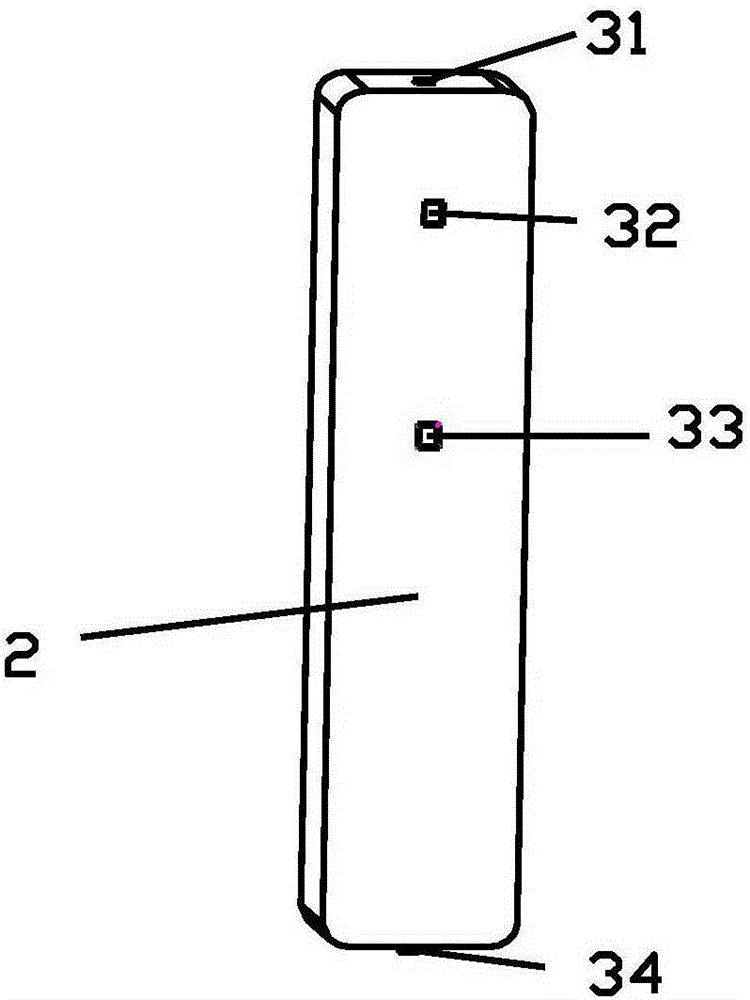
[0040] see Figure 1 to Figure 10 , is a controllable mechanism-type variable cell wheel mobile welding robot of the present invention, including a mobile platform 1, a fuselage 2, a first connecting rod 7, a second connecting rod 9, a third connecting rod 12, and a fourth connecting rod 18 , the fifth connecting rod 22, the sixth connecting rod 24, the seventh connecting rod 26, the eighth connecting rod 28, the first hydraulic rod 13, the second hydraulic rod 15, the first bracket 4, the second bracket 5, and the end execution device 30;
[0041] The belt is composed of the mobile platform 1, the fuselage 2, the first connecting rod 7, the second connecting rod 9, the third connecting rod 12, the first hydraulic rod 13, the second hydraulic rod 15, the first bracket 4 and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More