

Measurement and control communication method and system based on low-altitude unmanned aerial vehicle self-network
A technology of unmanned aerial vehicles and low-altitude aircraft, which is applied in the field of measurement and control communication, can solve the problems of unmanned aerial vehicle flight distance, single function, measurement and control communication system and method that cannot meet application requirements, and limited functions, so as to achieve communication efficiency and data throughput capacity, highly redundant backup performance, optimized communication and synergistic effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] Embodiment 1: A certain long-distance communication relay task.
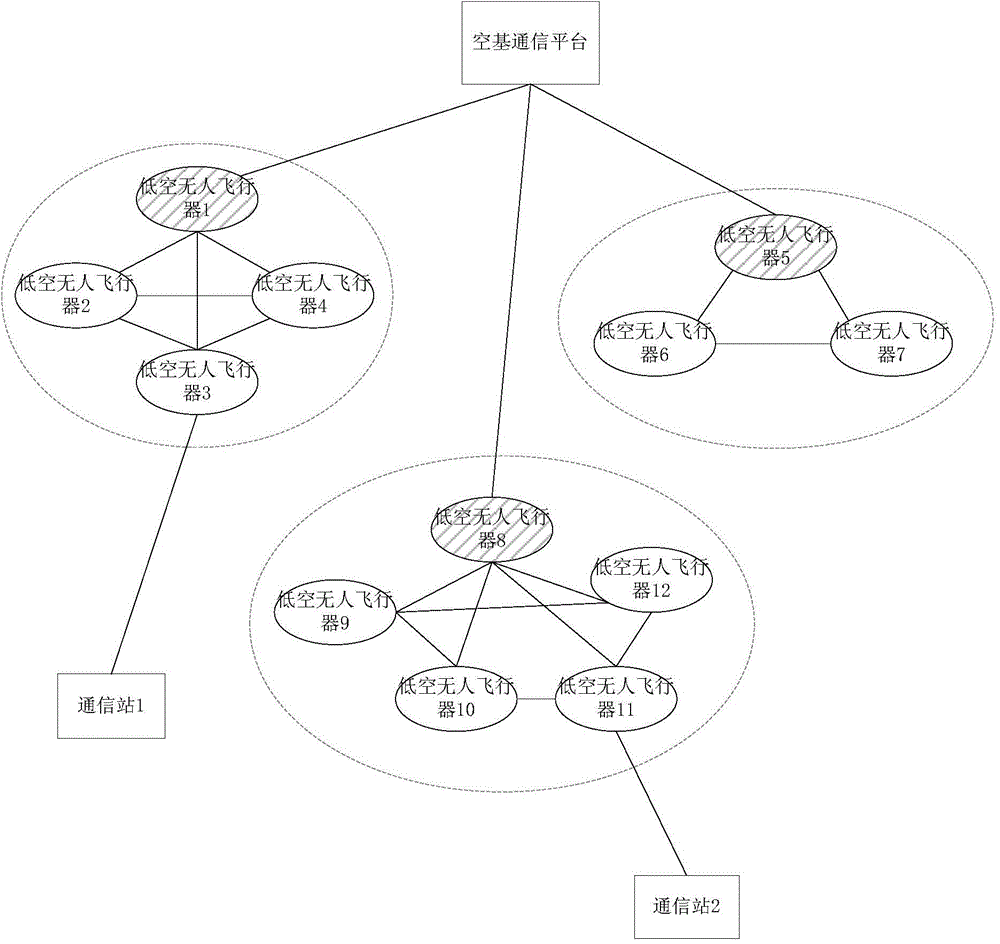
[0049] The business of a certain group needs to be completed by two node groups belonging to two different regions. The communication between the two regions requires a long-distance wireless data relay. The low-altitude UAVs are clustered and named C1~C3. Such as figure 1 As shown, in L1 administrative region, a data terminal sends a certain data sequence to communication station 1 through ground routing, and communication station 1 sends it to an aircraft node with communication relay function in cluster C1 through a wireless transmitting antenna, such as low-altitude unmanned Aircraft 3, the node transmits the communication relay demand to the cluster head of cluster C1, such as low-altitude unmanned aerial vehicle 1, after the cluster head calculates multiple alternative paths according to the best overall link performance priority routing algorithm, according to the transmitted data The type is opt...
Embodiment 2
[0051] Embodiment 2: A certain wide-area geological survey task.
[0052] For a large-scale geological survey task, the monitoring range of a single specific aircraft is small and the cost is high, and multiple low-altitude unmanned aerial vehicles are required to complete it together. Due to the continuous movement of low-altitude unmanned aerial vehicles, the number of aircraft above the target area is constantly changing. Need to adopt the method and system described in the present invention to accomplish. At a certain moment, it is assumed that the target area is covered by 3 sub-clusters, which are respectively named C1-C3, and the optical image data streams acquired by each sub-cluster are respectively P1-P3. After the cluster heads of clusters C1 and C2 calculate multiple alternative paths according to the best overall link performance routing algorithm, they optimize the routing sequence for data transfer according to the type of data transferred, and P1 and P2 are tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More