

Force sense manipulator with mechanical arm
A technology for manipulators and robotic arms, applied in manipulators, claw arms, manufacturing tools, etc., can solve the problems that force-sensing manipulators cannot meet requirements and structural differences, and achieve flexible drive layout, large structural rigidity, error the effect of elimination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described in detail below in conjunction with the accompanying drawings.
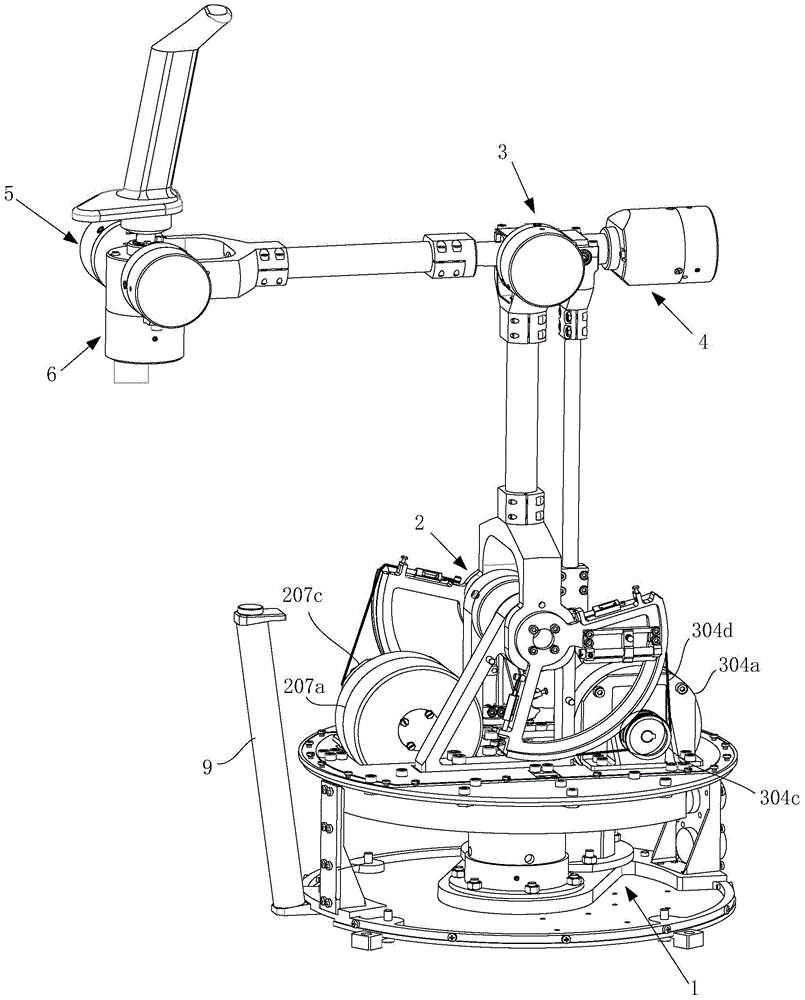
[0050] The force sense manipulator with the mechanical arm of the present invention has six joints, and the overall structure is a series link structure with parallel connecting rods, and each joint controls a degree of freedom of the end effector of the mechanical arm. Such as figure 1 As shown, among the six joints, the first joint 1, the second joint 2 and the third joint 3 are three joints at the bottom; the first joint 1 is used to control the horizontal rotation of the end effector of the controlled mechanical arm, and the second joint 2 is used for to control the end effector of the controlled mechanical arm to swing back and forth, and the third joint 3 is used to control the end effector of the controlled mechanical arm to swing up and down. The fourth joint 4, the fifth joint 5 and the sixth joint 6 are three terminal joints; the fourth joint 4 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More