Vehicular steering controller
A technology for control devices and vehicles, which is applied to vehicle components, automatic steering control components, transportation and packaging, etc., and can solve problems such as user disobedience and steering mismatch
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach >
[0056] Hereinafter, a first embodiment of a steering control device for a vehicle will be described with reference to the drawings.
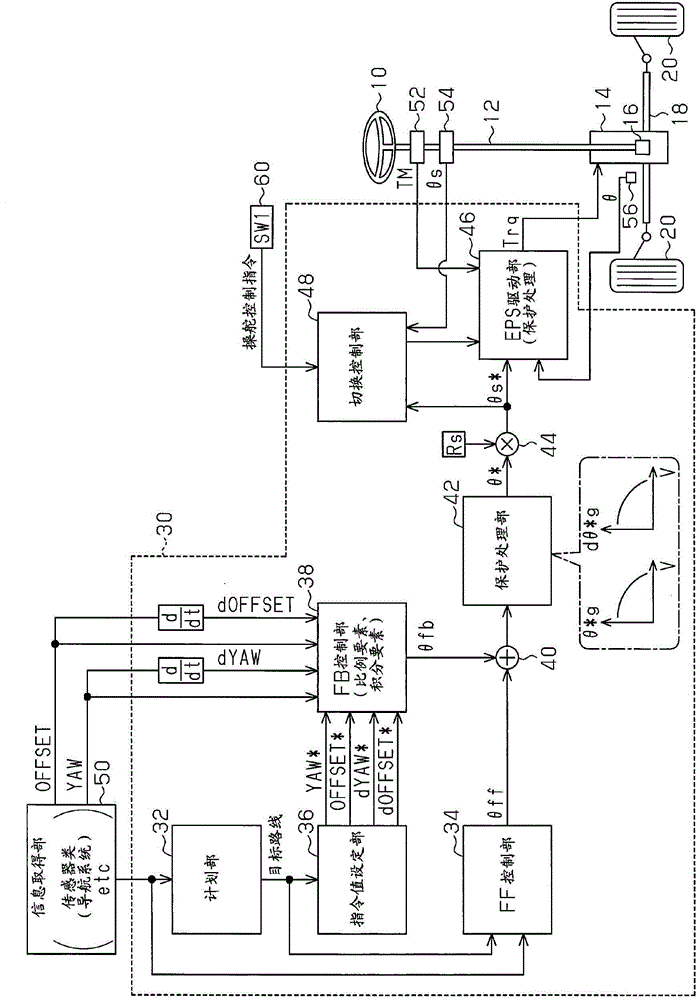
[0057] figure 1 A system according to this embodiment is shown.
[0058] The steering wheel 10 is mechanically connected to a wheel (steering wheel 20 ) via a link 12 , a pinion 16 , and a rack 18 . The gear rod 18 is connected to the electric steering gear 14 . The electric steering gear 14 is a steering assist device for assisting input operations to the steering wheel 10 . In addition, the electric steering gear 14 is also an actuator for steering the tire angle θ with the tire angle θ as a control amount regardless of whether there is an input operation to the steering wheel 10 . The tire angle θ is an angle formed by a plane whose normal line is the axis of the steering wheel 20 and a predetermined direction defined by arbitrary two points of the vehicle. In the present embodiment, the predetermined direction is the front-rear direction...
no. 2 approach >
[0097] Hereinafter, regarding the second embodiment, differences from the first embodiment and the like will be mainly described with reference to the drawings.
[0098] In the present embodiment, the integral element is stopped during manual driving. In addition, in the present embodiment, the reliability of the steering control is evaluated in advance when the steering control is executed, and the steering control is not executed when the reliability of the steering control is low.
[0099] Figure 6 Indicates the procedure of the evaluation process of the reliability of the steering control. Figure 6 The shown processing is repeatedly executed by the control device 30 at, for example, a predetermined cycle.
[0100] exist Figure 6 In the series of processes shown, the control device 30 first determines whether or not the vehicle is in the manual driving state (S40). This processing is provided to evaluate the reliability of steering control before switching from manua...
no. 3 approach >
[0114] Hereinafter, regarding the third embodiment, differences from the first embodiment and the like will be mainly described with reference to the drawings.
[0115] In the present embodiment, the contribution rate corresponding to the input operation to the steering wheel 10 to the steering torque Trq is gradually decreased and the contribution rate corresponding to the steering angle command value θs* is gradually increased as the steering control is started.
[0116] Figure 8 The sequence of the start processing of the steering control according to this embodiment is shown. This process is repeatedly executed by the control device 30 at, for example, a predetermined cycle. exist Figure 8 The processing shown, for the Figure 4 Parts corresponding to the shown processes are denoted by the same step numbers for convenience of description.
[0117] In this series of processes, when the control device 30 judges in the affirmative in step S26, it starts the steering con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com