

A high-precision control system and control method for an electric six-degree-of-freedom motion platform
A motion platform and control system technology, applied in three-dimensional position/channel control, etc., to achieve high reliability, good motion synchronization, and high real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] In order to make the purpose, content and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
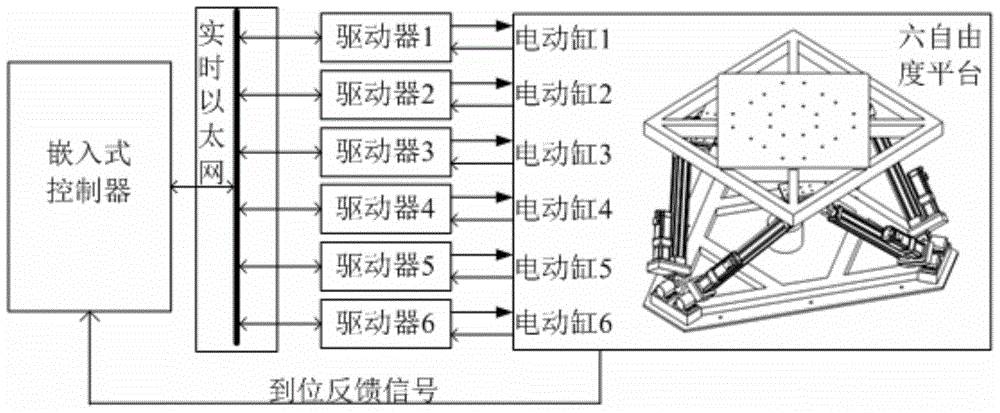
[0028] refer to figure 1 As shown, the six-degree-of-freedom motion platform body in this embodiment is a Stewart configuration parallel mechanism, which adopts an all-electric drive mode, including an upper platform, a lower platform, 6 electric cylinders, and a kinematic hinge connecting the upper and lower platforms.
[0029] Based on the structure of the above-mentioned six-degree-of-freedom motion platform, the hardware of the platform control system in this embodiment adopts a multi-axis servo system solution based on industrial real-time Ethernet. For the principle of hardware composition, see figure 1 As shown, specifically, the control system includes an embedded controller, a real-time Ethernet bus network and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More