

Modular double-degree-of-freedom spherical joint and snake-shaped robot and movement control method
A snake-shaped robot and spherical joint technology, applied in the field of robotics, can solve problems such as insufficient joint driving ability, and achieve the effect of improving joint driving ability, strong movement ability and high redundancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Specific embodiments of the present invention will be described in conjunction with the above drawings.
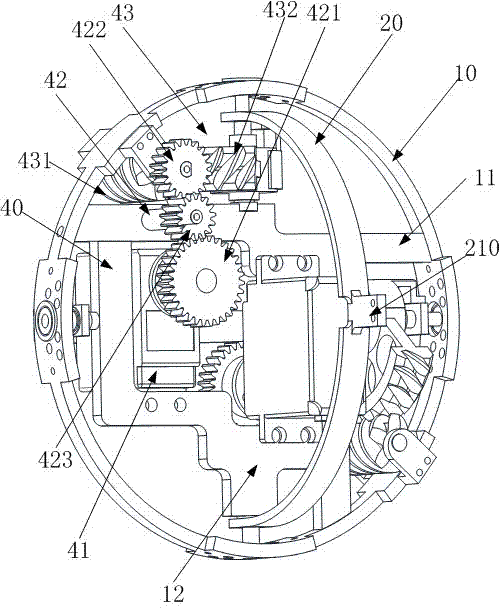
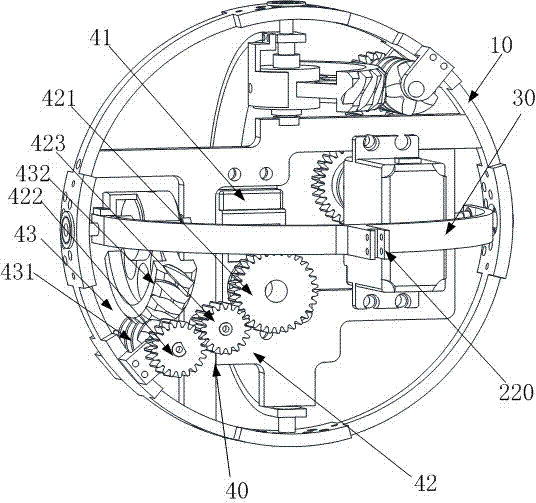
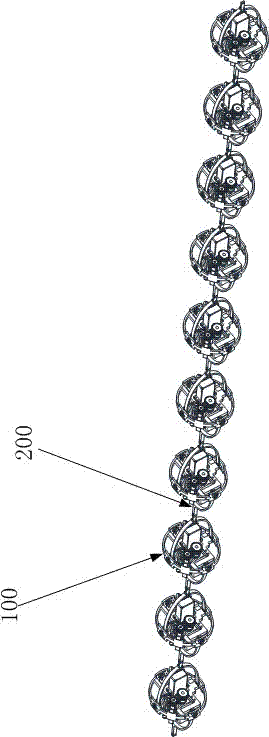
[0021] by image 3 with Figure 4 It can be seen that the snake-shaped robot of the present invention includes a number of spherical joints 100 and a connecting member 200 for connecting two adjacent spherical joints 100, and also includes a shell laid on the outside of the spherical joint 100. The connecting member 200 includes a first connecting plate 210 and a second connecting plate 220 with a fork-shaped connector at one end. One end of the first connecting plate 210 is hinged with the fork-shaped connector of the second connecting plate 220. The other end of the plate 210 and the other end of the second connecting plate 220 are respectively connected to two adjacent spherical joints 100, and the serpentine robot is preferably formed by connecting 10 spherical joints 100 in series. The robot joints of the present invention are completely modularized, and there is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More