

Bionic foot for bionic robot
A technology of humanoid robot and bionic foot, which is applied in the field of humanoid robot, can solve the problems of bionic design of human foot arch and large impact force, etc., and achieve the effect of less impact, reduced impact force and great flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
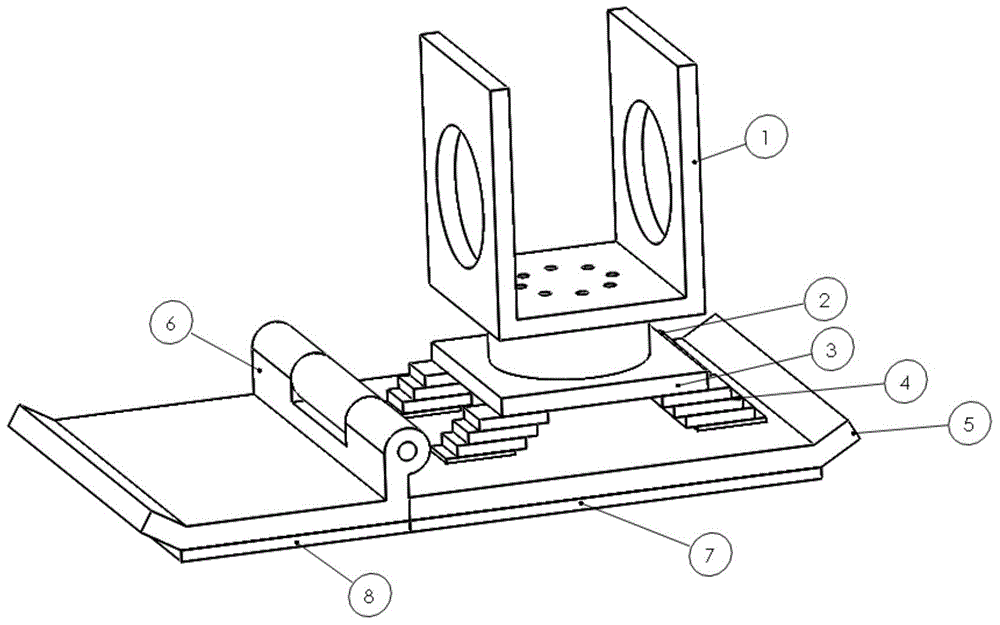
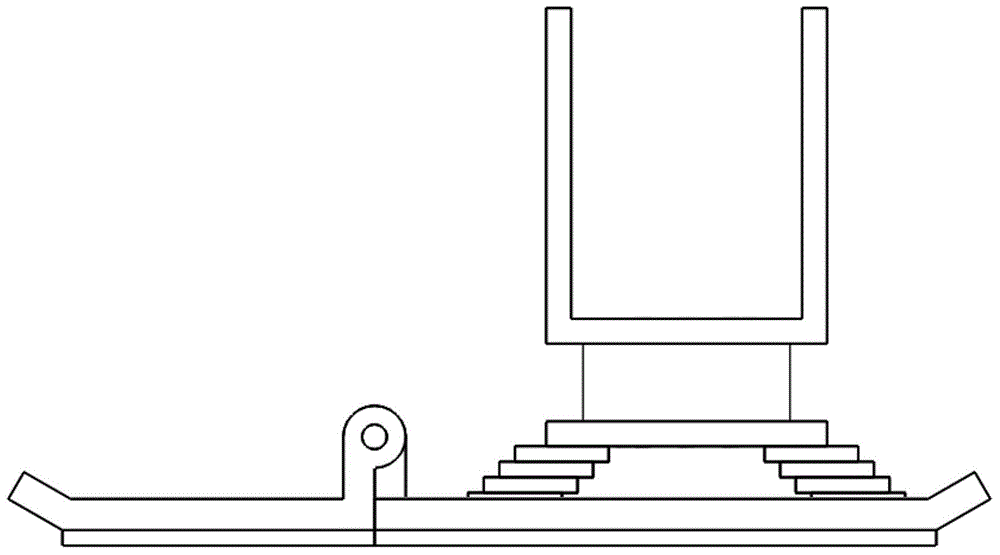
[0034] The bionic foot of the humanoid robot includes: sole base, bionic foot arch 4, movable sole, non-slip foot pad, humanoid robot ankle 1, six-dimensional force sensor 2, and six-dimensional force sensor fixed plate 3.
[0035] The sole base is the rear sole 5, which is the basis of the whole bionic foot, has the same size as the existing humanoid robot foot, and is made of an aluminum alloy plate. Such as figure 1 The structure shown from top to bottom is humanoid robot ankle 1, six-dimensional force sensor 2, six-dimensional force sensor fixed plate 3, arched bionic foot arch 4, bionic foot rear sole 5, forefoot sole 6, rear sole Anti-slip rubber 8, forefoot anti-slip rubber 7.
[0036] The ankle 1 of the humanoid robot, the six-dimensional force sensor 2, and the six-dimensional force sensor fixing plate 3 are fixedly connected by screws. The bionic arch 4 is arranged between the six-dimensional force sensor fixing plate 3 and the rear sole 5, respectively located at ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More