

Multi-palletizing robot teaching method based on distributed computing and machine vision
A palletizing robot and distributed computing technology, applied in the field of robot teaching, can solve problems such as low teaching efficiency and insufficient utilization of surplus computing resources, and achieve the goal of improving teaching operation speed, computing performance, and computing speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
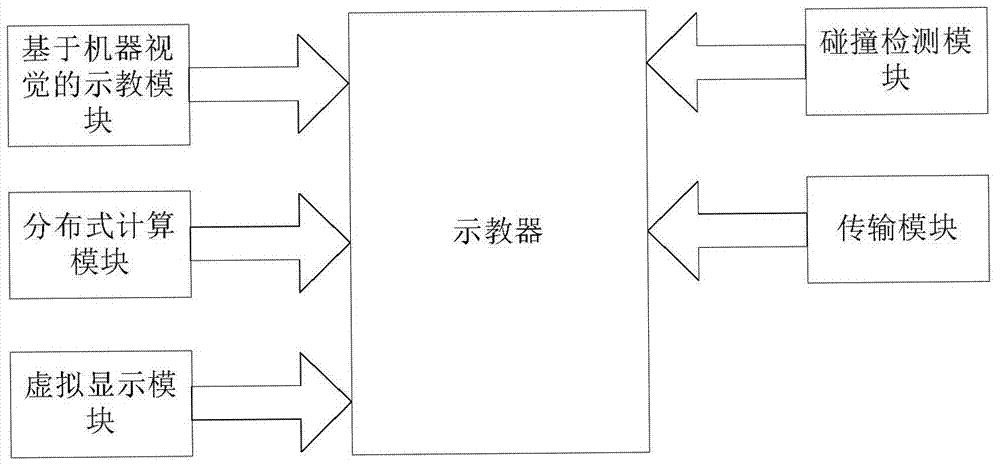
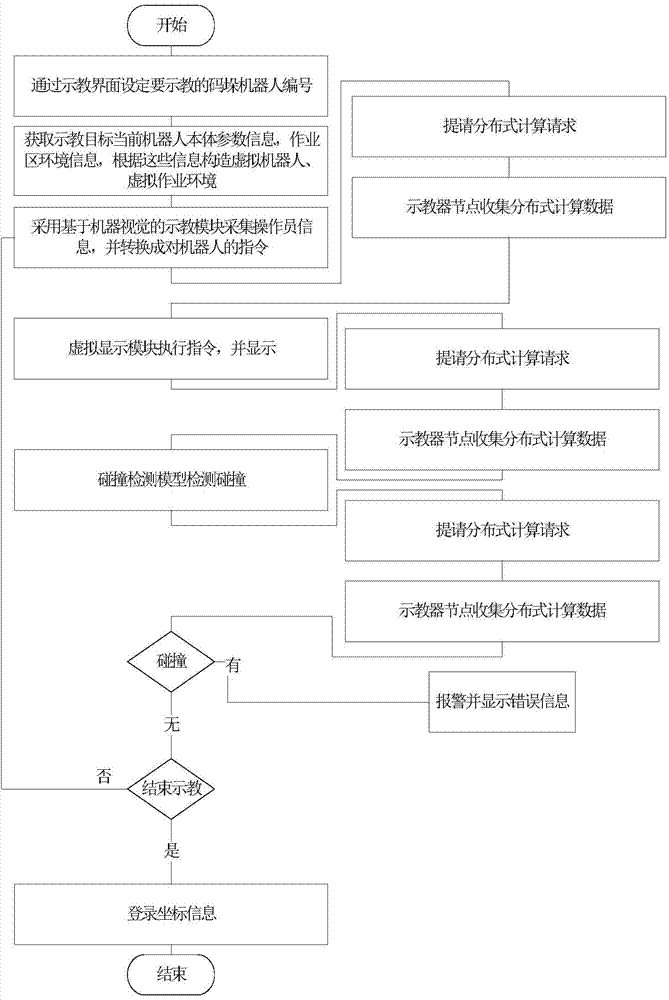
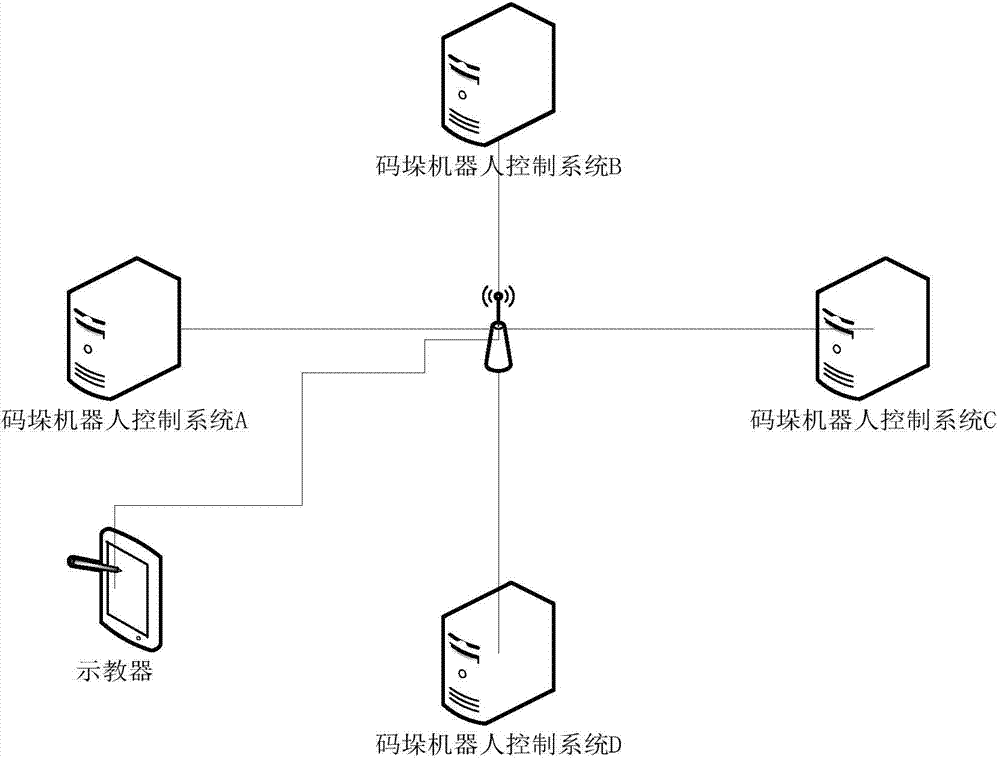
[0029] The main modules of this embodiment routine include: teaching module based on machine vision, distributed computing module, virtual display module, collision detection module, transmission module;
[0030] 1. The teaching module based on machine vision collects the action images of the instructor, and puts the collected images into the data temporary storage area of the teaching apparatus, and then obtains the action information type of the instructor through a series of image processing steps, and Finally converted into instruction information for the robot;
[0031] 2. The virtual display module, accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More