

Obstacle avoidance control method and system combining depth camera and ultrasonic wave for robot
A technology of depth camera and control method, which is applied in the field of obstacle avoidance control combined with depth camera and ultrasonic wave for robots, can solve the problems of error blind area and reflection angle, small error increase, large error, etc., so as to improve work efficiency, solve blind area and The effect of the reflection angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to express the present invention more clearly, the present invention will be further described below in conjunction with the accompanying drawings.
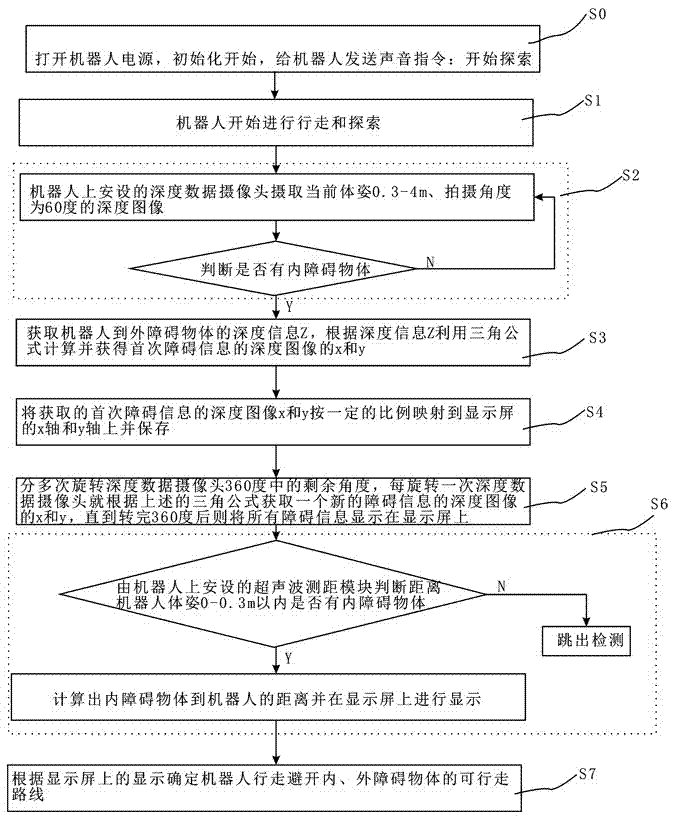
[0049] see figure 1 , the obstacle avoidance control method that robot of the present invention combines depth camera and ultrasonic wave, comprises the following steps:
[0050] Step S0, turn on the power of the robot, start the initialization, and send a voice command to the robot: start exploring.
[0051] In step S1, the robot starts to walk and explore.
[0052] Step S2, the depth data camera installed on the robot captures the depth image with the current body posture of 0.3-4m and the shooting angle of 60 degrees; if it encounters an external obstacle, it will enter step S3, if it does not encounter an external obstacle, it will return Step S1.
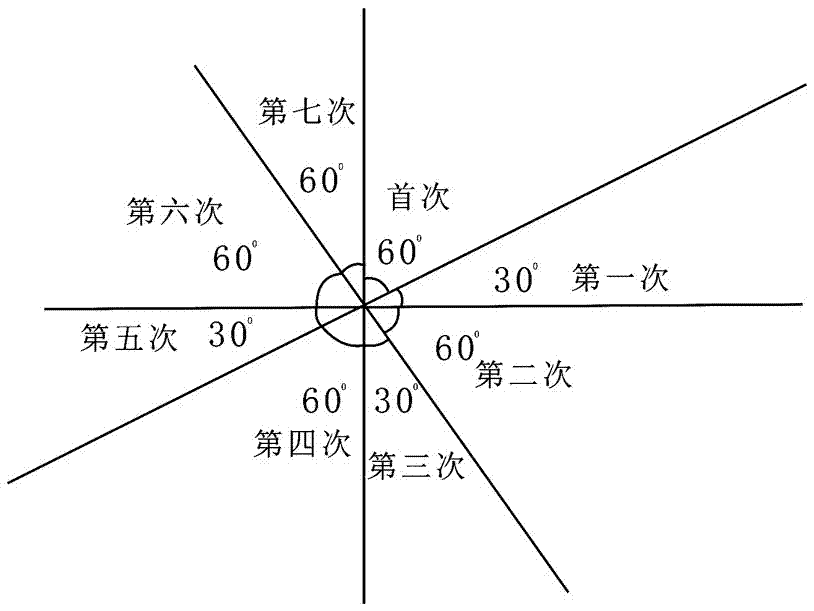
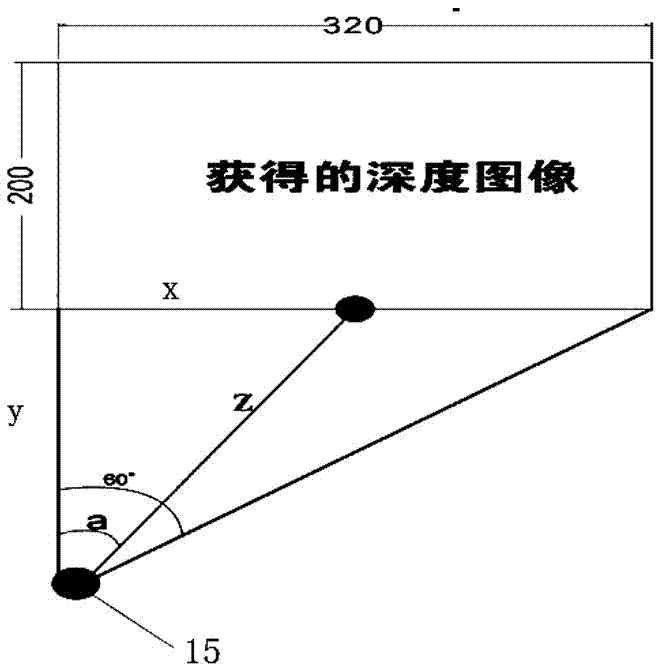
[0053] Step S3, obtain the depth information Z from the robot to the outer obstacle object, calculate and obtain the x and y of the depth image of the first obs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More