

Self-climbing control method of tracked mobile robot with double-rod arm
A mobile robot and control method technology, applied in the field of mobile robots, can solve problems such as the inability to use a crawler-type mobile robot control method, and achieve the effect of avoiding time delay problems and improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
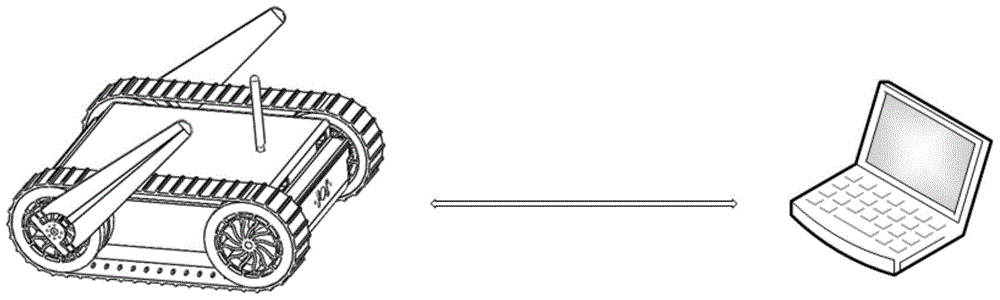
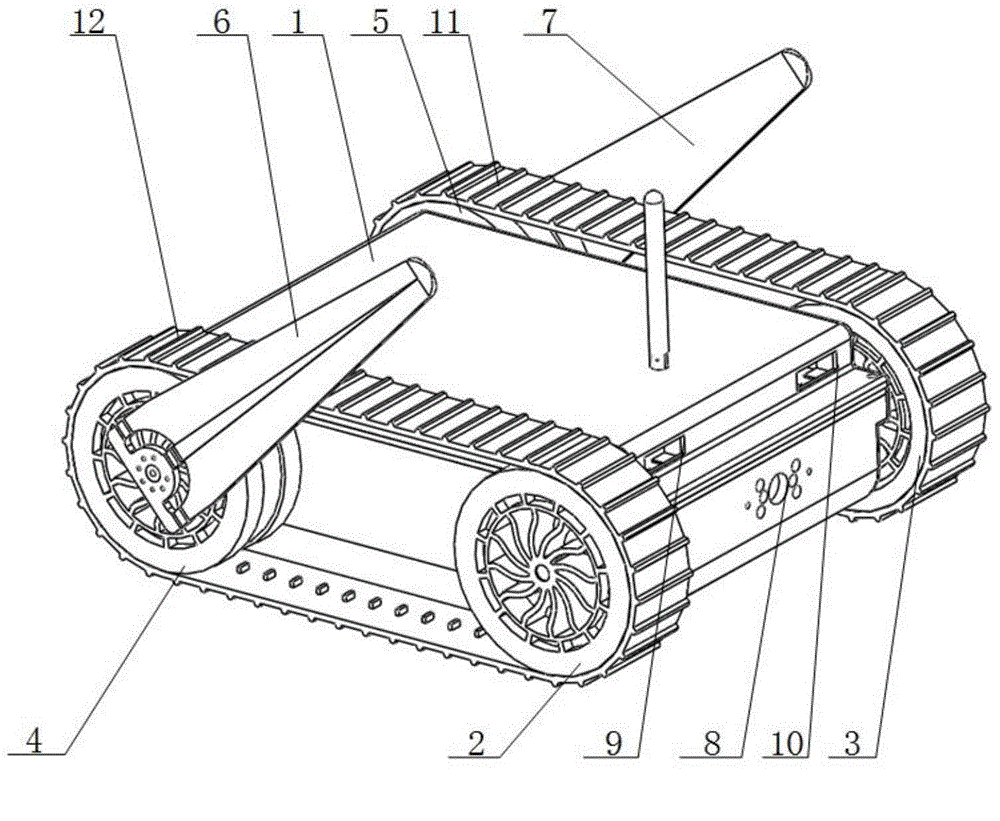
[0038] Example: Reference figure 1 , the overall system of this example includes a control terminal and a small crawler-type mobile robot with a double-rod arm, wherein the wireless communication between the control terminal and the small track-type mobile robot is carried out through WIFI. refer to figure 2 , the small-sized tracked mobile robot that this example adopts has double lever arm to be made up of car body 1, drive wheel 2-3, support wheel 4-5, lever arm 6-7, camera 8, infrared sensor 9-10, Crawler belt 11-12 etc. are formed. The dimensions of the robot are 200 mm in length, 180 mm in width, and 60 mm in height, and the length of the lever arm is 150 mm. This example has a maximum climbable height of 157mm.
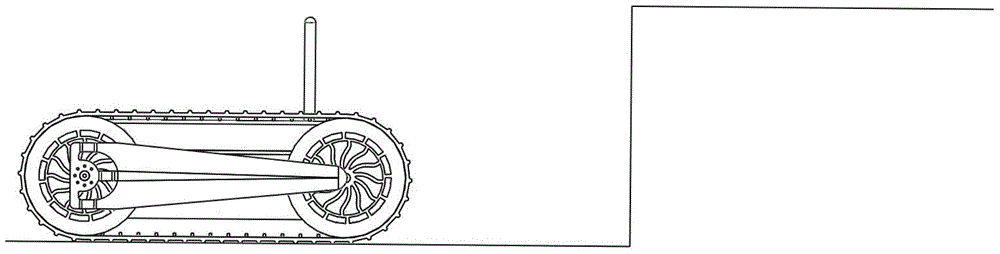
[0039] The stairs used in this embodiment are linear stairs that meet the national standard. According to the "General Rules for Civil Building Design", the step width of indoor and outdoor steps in public buildings should not be less than 30 cm, and the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More