

Cooperative safety communication method in multi-UAV environment
A secure communication and multi-UAV technology, which is applied in the field of collaborative secure communication in a multi-UAV environment, can solve problems such as the inability to predict topology changes, achieve the goals of reducing the communication range, fast computing speed, and improving network communication performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
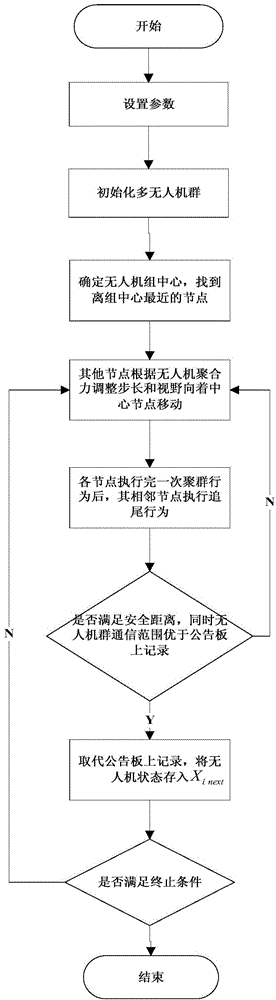
[0032] Such as figure 1 with figure 2 As shown, a collaborative security communication method in a multi-UAV environment includes the following steps:
[0033] Step 1: Establish a communication model, improve the artificial fish swarm algorithm IAFS, and reduce the communication range of the UAV;
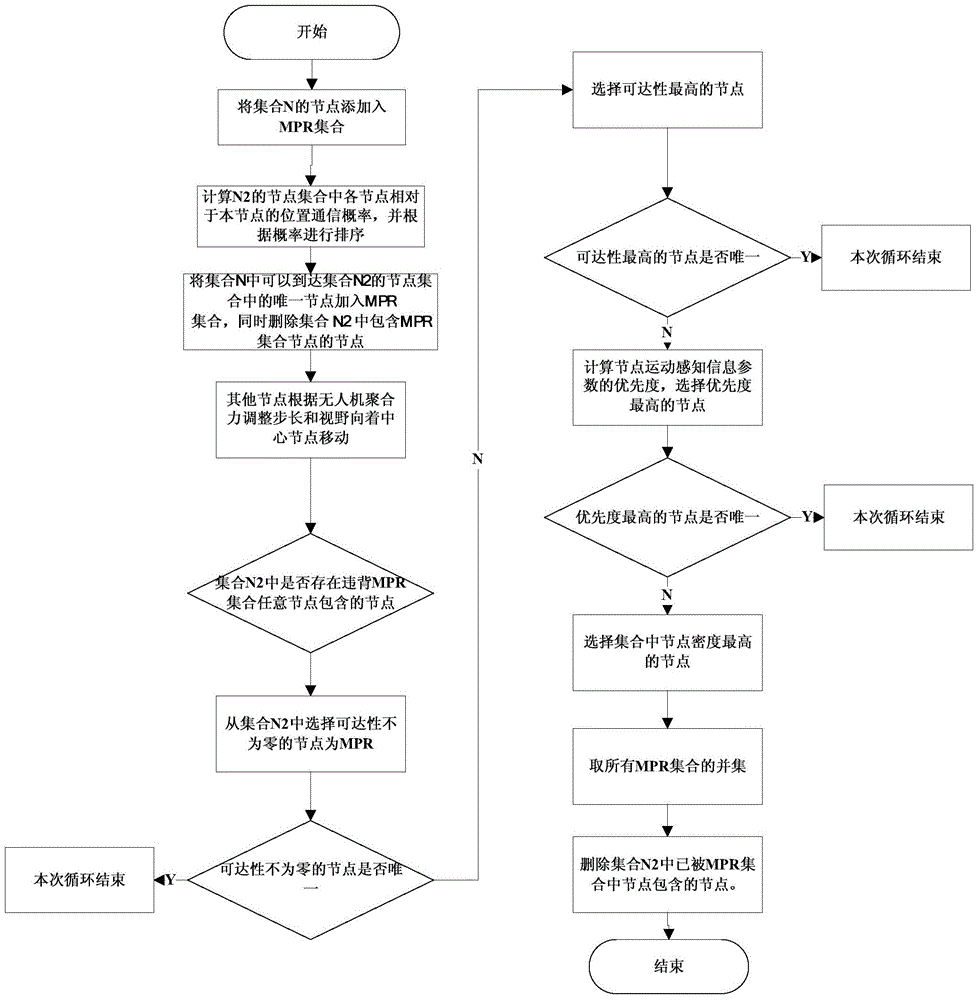
[0034] Step 2: Using the MPLSR protocol, the UAV motion perception information is used as the measurement parameter for MPR selection, and the MPR search algorithm is improved.
[0035] The specific steps of step 1 are as follows:
[0036] Step 1.1: Set parameters: set the number of drones n, transmit power P t , the safety distance d, the UAV communication frequency bandwidth W, the maximum number of trials Trynumber, the maximum number of iterations Iter_times parameters;
[0037] Step 1.2: Initialize drones: Generate n drones that meet the safety distance in the area, save their respective positions in X, set the number of iterations to p_times=0, find the three outermost no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More