

Plane and barrier detection method based on RGB-D camera and attitude sensor
A posture sensor and obstacle detection technology, applied in instruments, image data processing, computing, etc., can solve the problems of few effective points, difficult integration, high computing performance and storage requirements of processing modules
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062]The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
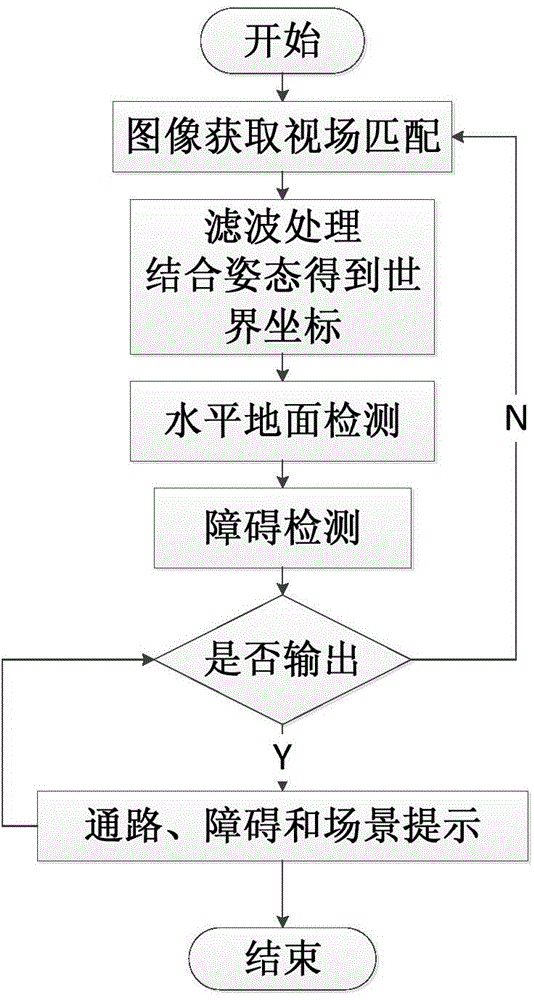
[0063] Such as figure 1 Shown, a kind of plane and obstacle detection method based on RGB-D camera and attitude sensor of the present invention, comprises the following steps:
[0064] (1) Acquisition of environmental three-dimensional information, specifically including the following sub-steps:
[0065] (1.1) Initialize the RGB-D camera to obtain the internal parameters of the color camera and the depth camera, the internal parameters include the horizontal field of view and the vertical field of view, and use the polling method to obtain RGB images from the RGB-D camera at the same time and the D image; the grayscale of the D image pixel is the horizontal depth value of the object corresponding to the pixel from the camera in the three-dimensional environment.
[0066] (1.2) Match the field of view of the RGB image and the D image,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More