

Stability control method of humanoid robot based on q-learning framework based on rbf network
A stable control method and RBF network technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as highly unstable, difficult to accurately model, system nonlinearity, etc., to achieve good general The effect of the ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0081] The specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings, but the implementation and protection of the present invention are not limited thereto. Achieved with technology.
[0082] (1) Through the ZMP analysis of the simplified humanoid robot model using the 3D inverted pendulum model, the center of mass and foothold trajectory of the robot during walking are calculated. Using the trajectory of the robot's center of mass and foothold, through inverse kinematics analysis, we obtain the motion trajectory of each joint during the walking process of the humanoid robot, and save it as the basic gait information of the robot offline.
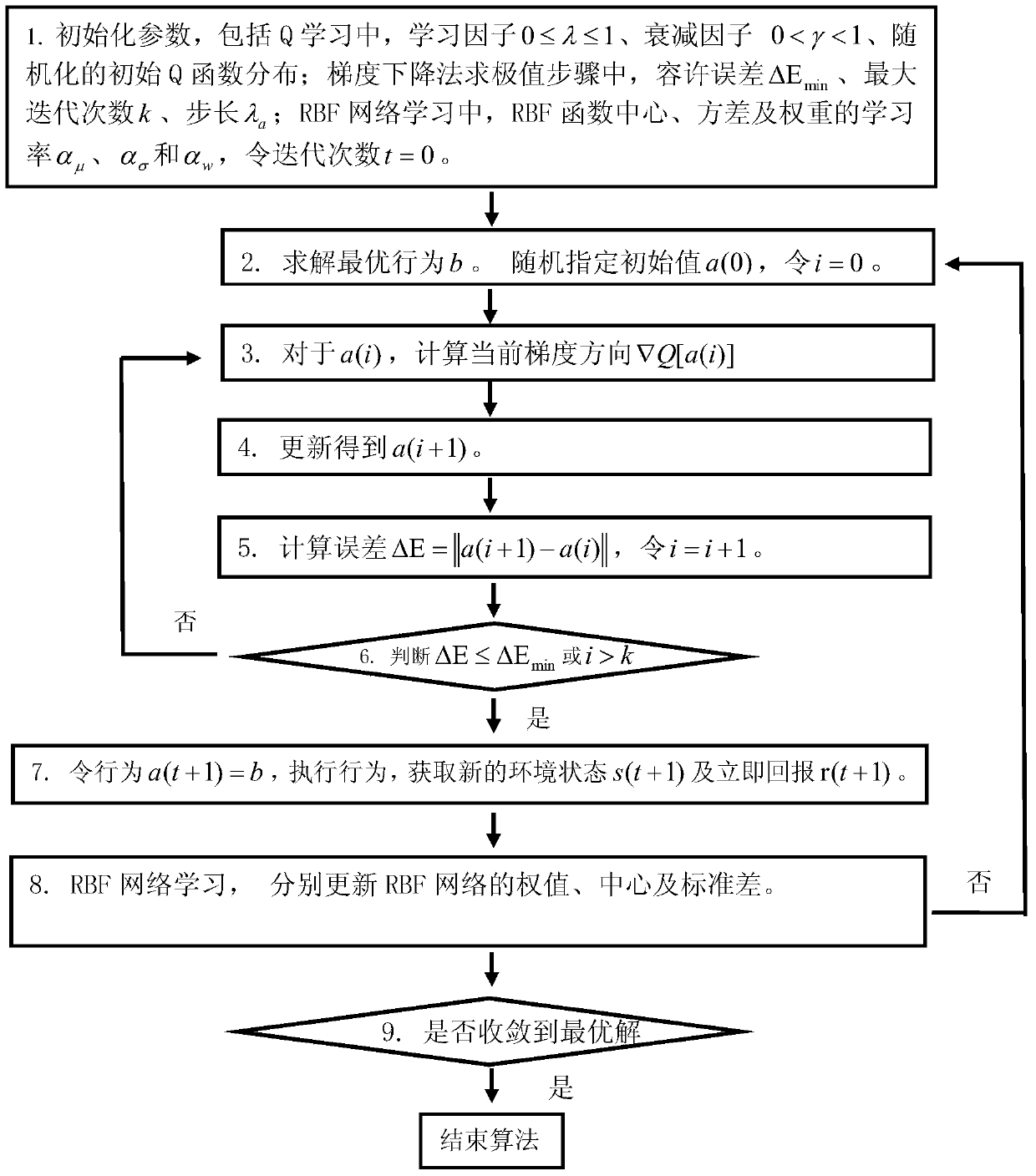
[0083] (2) Design of Q-learning framework (RBF-Q Learning) based on RBF network.
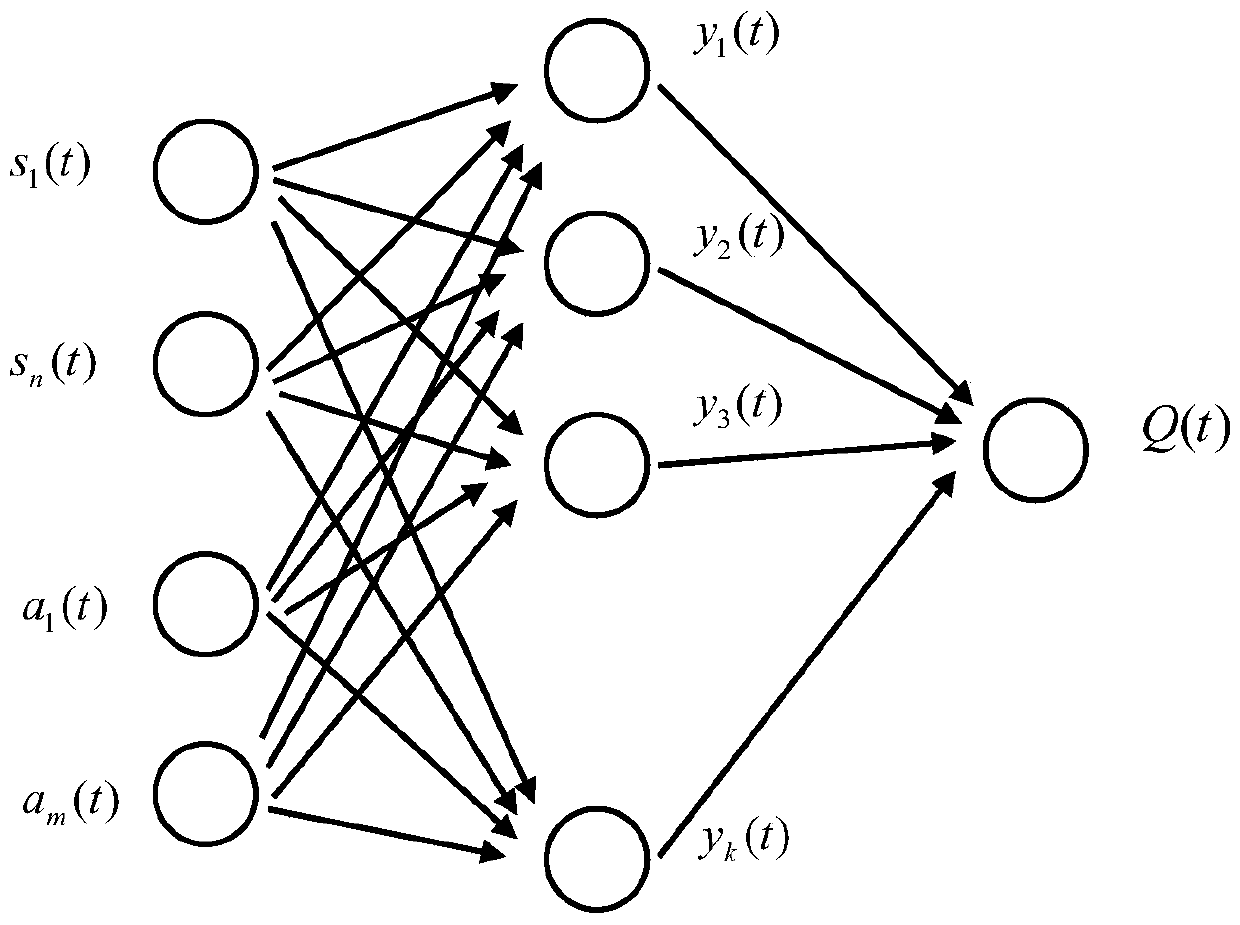
[0084] 1) Q function of RBF network fitting
[0085] Combined with RBF network to approximate and fit the Q function in Q learning. Assuming that the Q function receives a state vector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More