

A Holographic Optimal Sliding Mode Controller for Vehicle Active Suspension
An optimal sliding mode and active suspension technology, applied in the direction of suspension, elastic suspension, vehicle components, etc., can solve the problems of poor robustness and achieve the effect of nominally optimal performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
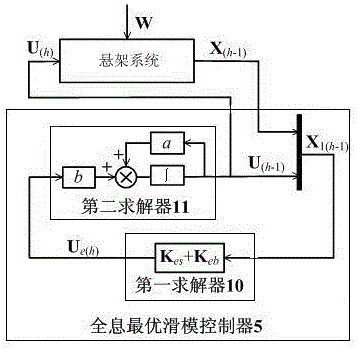
[0020] Such as figure 1As shown, the holographic optimal sliding mode controller 5 for vehicle active suspension of the present invention is composed of a first solver 10 and a second solver 11, the first solver 10 is an extended optimal sliding mode solver, and the second The solver 11 is an extended equation solver. The input of the holographic optimal sliding mode controller 5 is the motion state vector X of the suspension system in the h-1th working cycle (h-1) , the output of the holographic optimal sliding mode controller 5 is the suspension control force generator control force U of the hth working cycle (h) , h is an integer greater than 0. The output of the first solver 10 is the input of the second solver 11, and the input of the first solver 10 during the h-th working cycle is the suspension system motion state vector X of the h-1 working cycle (h-1) and the suspension control force generator control force U of the h-1th working cycle (h-1) combined to form the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More