

A strong self-coupling pi cooperative control method for large UAV UAV
A collaborative control, unmanned aerial vehicle technology, applied in the field of aircraft control, can solve the problems of poor real-time performance, out-of-control second-order non-singular dynamic terminal sliding mode control method, and large amount of calculation, so as to solve the problem of irreconcilability and avoid PID gain The effect of difficult tuning and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
[0037] 1. Mapping ideas from non-affine nonlinear uncertain systems to reflective linear uncertain systems
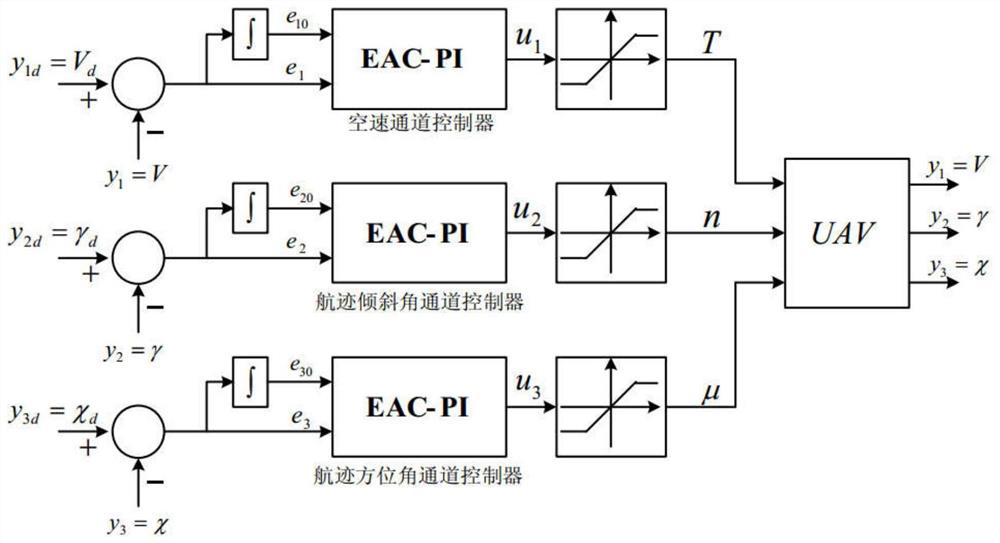
[0038] Consider an Unmanned Aerial Vehicle (UAV) system:
[0039]
[0040] Among them: V, γ, and χ are the airspeed, track inclination angle, and track azimuth of the UAV, respectively; T, n, μ are the engine thrust, overload coefficient, and roll angle, respectively; g is the gravitational acceleration; M is the mass of the UAV ; D is resistance, and expressed as:
[0041]
[0042] Among them, the parameters of formula (2) are shown in Table 1 in detail:
[0043] Table 1 UAV basic parameters
[0044]
[0045]
[0046] At the same time, the actual flight safety requirements of UAV should also be considered, that is, the roll angle μ should meet: |μ|≤90°; the overload factor n sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More