A regional path tracking control method for autonomous vehicles
An autonomous driving and path tracking technology, applied in two-dimensional position/lane control, etc., can solve problems such as inability to guarantee vehicle collisions, and failure to consider the shape and size of vehicles and roads
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0147] The present invention is described in detail below in conjunction with accompanying drawing:
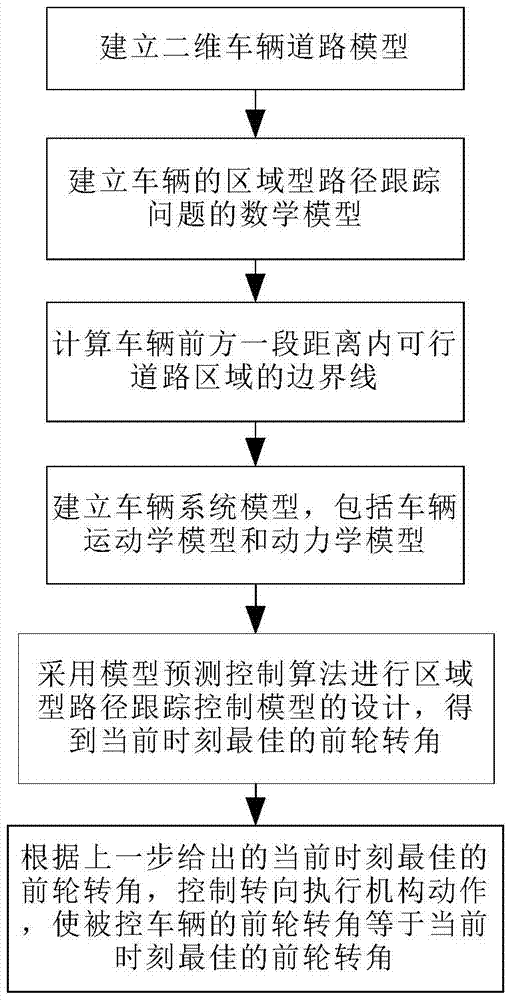
[0148] The present invention proposes a regional path tracking control method for an autonomous driving vehicle, and its specific implementation steps are as follows:
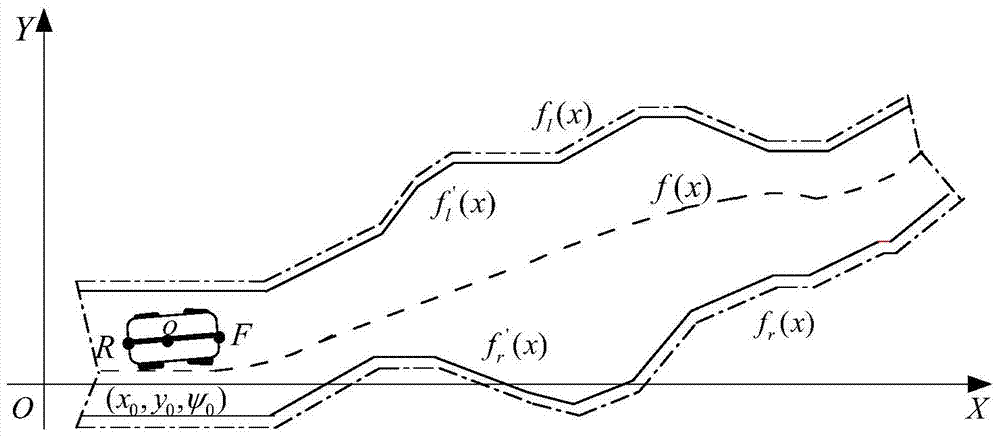
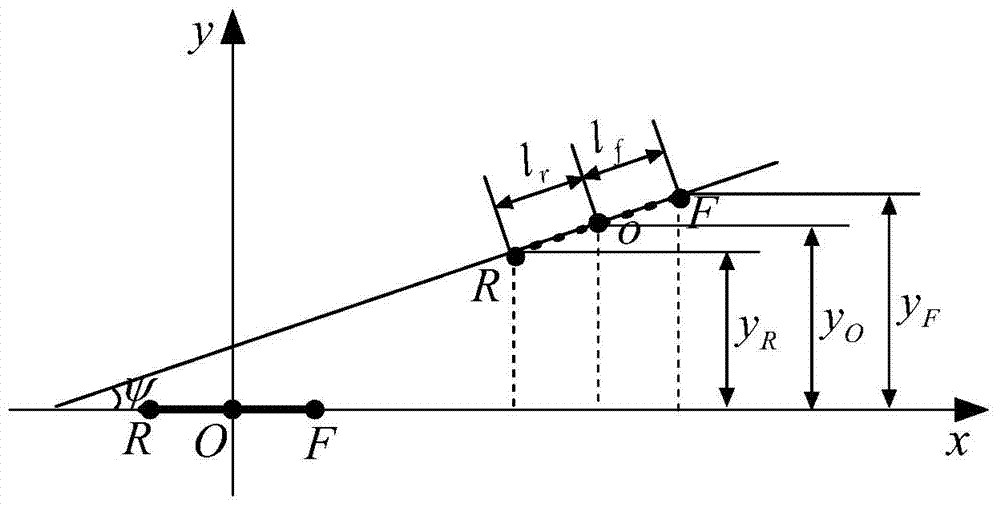
[0149] Step 1. Establish a two-dimensional vehicle road model:
[0150] The present invention establishes a novel two-dimensional vehicle road model, as shown in the attached figure 2 shown. Neglecting the width of the left and right sides of the vehicle, the vehicle is represented by a rigid rod RF passing through the center of mass o of the vehicle, and the length of the rigid rod RF is equal to the length l of the vehicle body. The expected path is determined by the left boundary line f of the expected road area l '(x), the right boundary line f of the expected road area r '(x) and the expected road area center line f(x) to represent the expected road area, where the left boundary line of the expected r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More