

Under-actuated biped robot
A bipedal robot and underactuated technology, applied in the field of robotics, can solve the problems of a large number of drives and rotating mechanisms, low precision, and poor flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0019] The definition of hip joint 4 described in this article refers to a rotation mechanism used to connect the waist and legs and make the legs rotate at multiple angles relative to the waist, that is, to simulate the gap between the thigh and the pelvis in the human body structure. of the hip joint. Similarly, the ankle joint refers to the multi-angle rotation mechanism used to connect the leg and the sole, that is, the ankle joint that simulates the sole of the human body and the lower end of the calf.
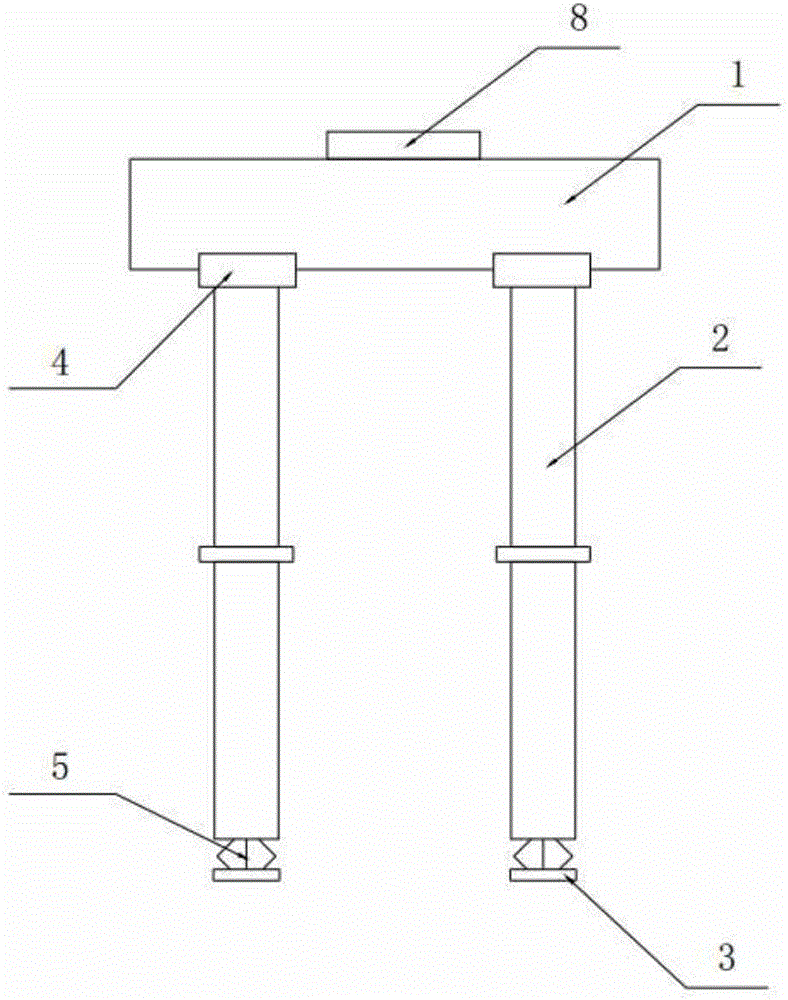
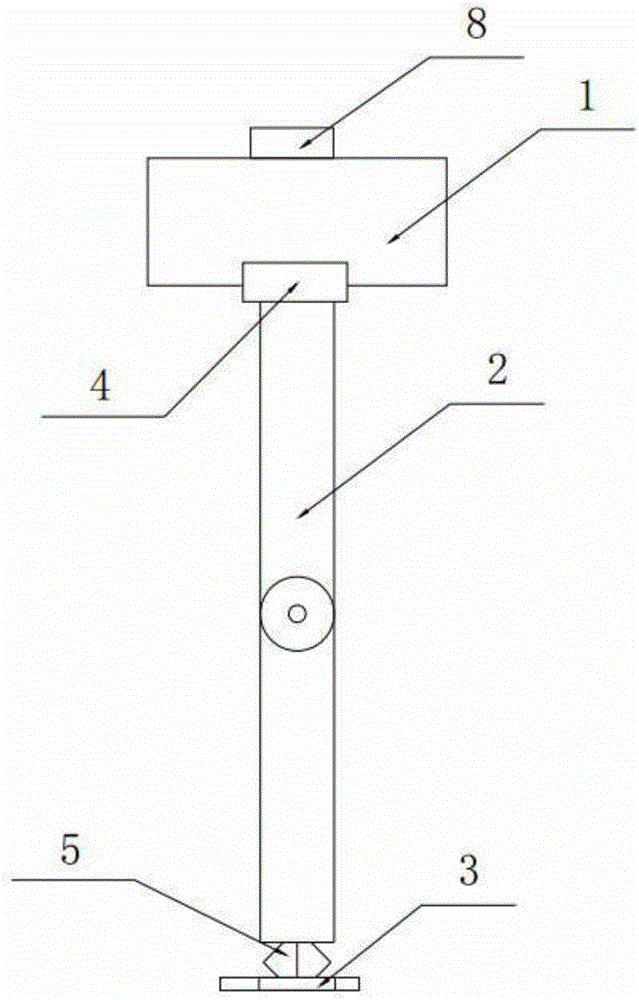
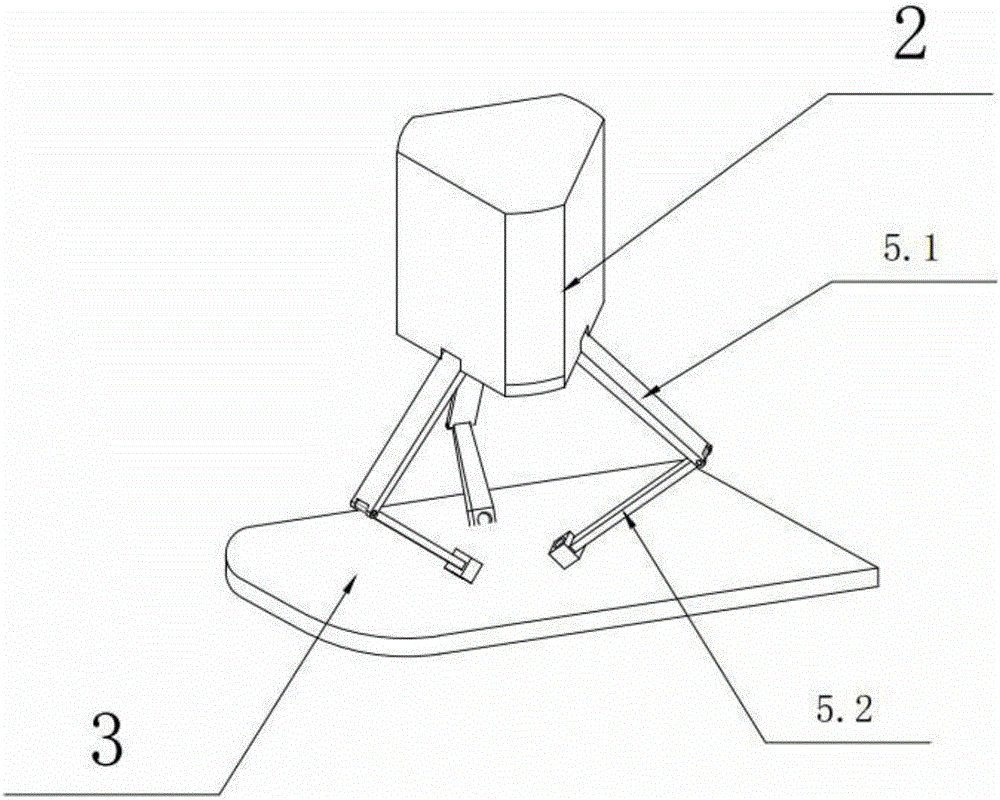
[0020] As shown in the figure, the present invention provides a kind of underactuated bipedal robot, and it comprises waist 1, leg 2 and sole 3, and the upper end of described leg 2 is connected with waist 1 through hip joint 4, and the upper end of described leg 2 The lower end is connected to the sole 3 through the ankle joint 5, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More