

Instant route-finding method for three-dimensional scene
A three-dimensional scene and pathfinding technology, applied in image data processing, 3D modeling, instruments, etc., can solve the problems of high computational failure risk and high computational cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
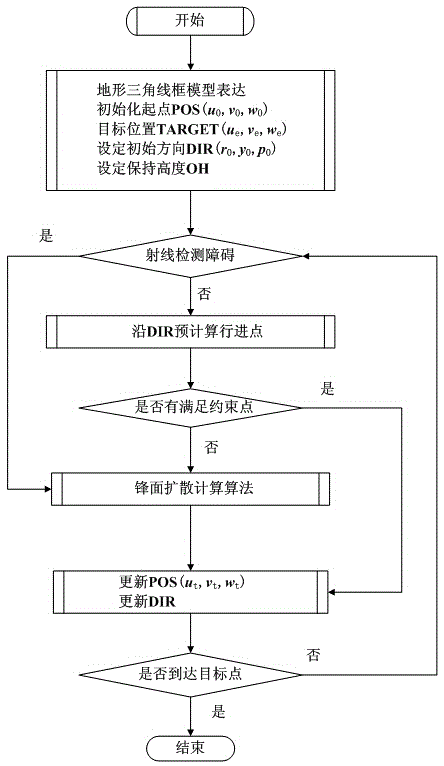
[0058] The invention provides an instant path finding method for a three-dimensional scene, which can make the path finding process intelligent and adaptive, and optimize the heuristic automatic path finding in a three-dimensional outdoor scene. The theoretical basis of the present invention mainly has the following four points:
[0059] 1. Tri-Mesh model (tri-Mesh)
[0060] In the discussion of path search on two-dimensional plane and part of three-dimensional terrain, a regular rectangular wireframe model is usually used to represent a plane map. The regular rectangular wire frame has better regularity and symmetry, and has more advantages in the terrain management of the level of detail (LOD). Different from the expression of the rectangular wireframe model, in practical applications, the production of terrain can be generated by 3D-Max, Maya and other three-dimensional modeling tools, and directly exported as terrain data. Among them, the triangular wire frame model is a typi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More