

Unmanned aerial vehicle assisted vehicle-mounted road acquisition three-dimensional modeling system and realization method thereof
A technology of 3D modeling and realization method, applied in 3D modeling, image data processing, measuring devices, etc., can solve problems such as insufficient collection of road information, inability to establish a 3D model of a tunnel, and inability to realize positioning, and achieve data processing automation High degree, low project development cost, and the effect of saving project development cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
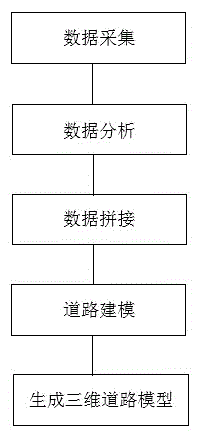
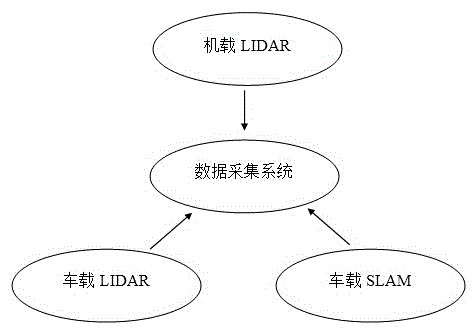
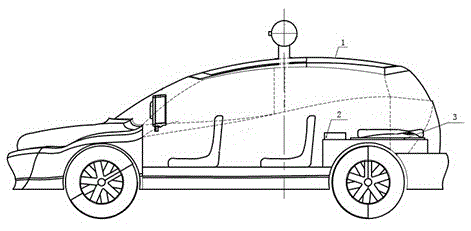
[0038] Such as figure 1 , 2 , 3, this embodiment provides a UAV-assisted vehicle-mounted road acquisition three-dimensional modeling system, the modeling system is mainly based on the carrier vehicle and its subsystems, and the UAV and its subsystems are Auxiliary, the reason is that the carrier vehicle and its subsystems quickly collect road data, and then use the collected data to generate a three-dimensional model of the road. Since the vehicle-mounted road data acquisition system cannot collect substructure information such as pier columns of the bridge, UAVs are used to accurately scan and collect substructure information such as pier columns of the bridge to obtain 3D data of the lower part of the bridge. At the same time, the vehicle-mounted data acquisition module integrates the SLAM system, which can realize accurate positioning of places where satellite signals cannot reach, accurately collect 3D data in the tunnel, and splicing with GPS satellite information outsid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More