

Multi-unmanned-plane emergency rescue task distribution method
A task allocation and multi-UAV technology, applied in the field of UAV, can solve the problems of coupling limitation, low efficiency, neglect of task connection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
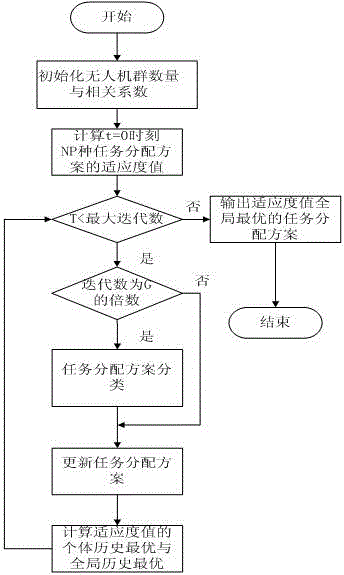
[0045] like figure 1 and figure 2 As shown, the present invention discloses a multi-UAV emergency relief task assignment method, comprising the following steps:
[0046] Step 1), obtain the number of drones and the position of each drone, the number of targets and the position of each target;
[0047] Step 2), randomly obtain NP kinds of task allocation schemes X={X 1 ,X2 ,...,X NP}, NP is the preset number of initial task schemes;
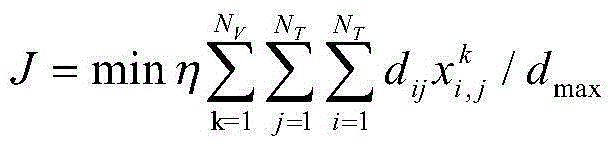
[0048] Step 3), establishing an objective function J as an evaluation criterion for the task assignment scheme;
[0049] Step 4), using the objective function J as the fitness function f, calculate the fitness value of all task allocation schemes at the initial moment, and record the fitness value and the task allocation scheme at this time, and initialize the update times t of the task allocation scheme is zero...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More