

Method for distinguishing optical axis of camera in real time
A camera and optical axis technology, which is used in real-time discrimination of the relative pose of objects in machine vision, real-time discrimination of the optical axis of cameras, and can solve problems such as poor user experience, LED screen absorption, and unsatisfactory laser effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
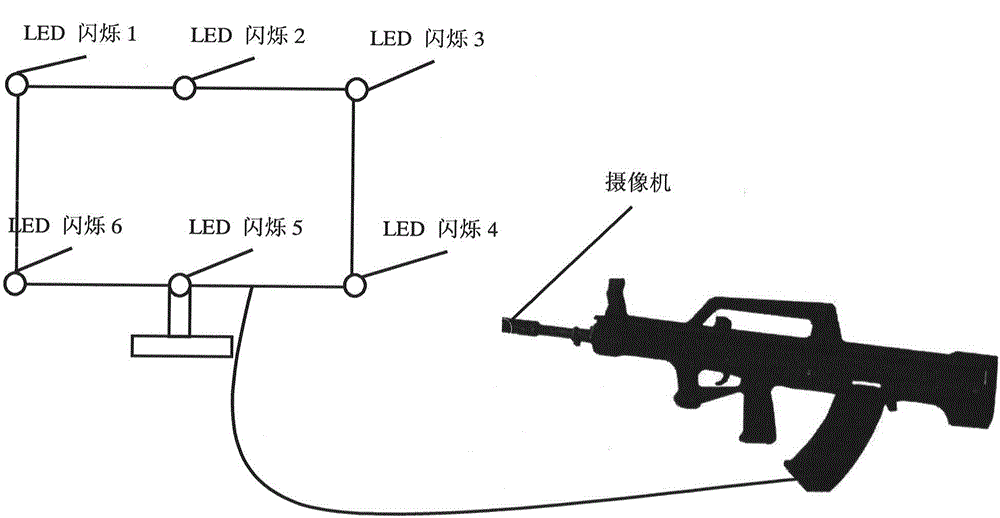
[0050] Step 1: If figure 1 , install LEDs on the game display screen to blink, and the number of installed LEDs to blink depends on the size of the field of view. The virtual gun has a built-in high-speed camera for real-time acquisition of LED flashing images installed on the screen, and performs background light removal processing on the collected LED flashing images installed on the screen. The method for removing background light is preferably the frame difference method.
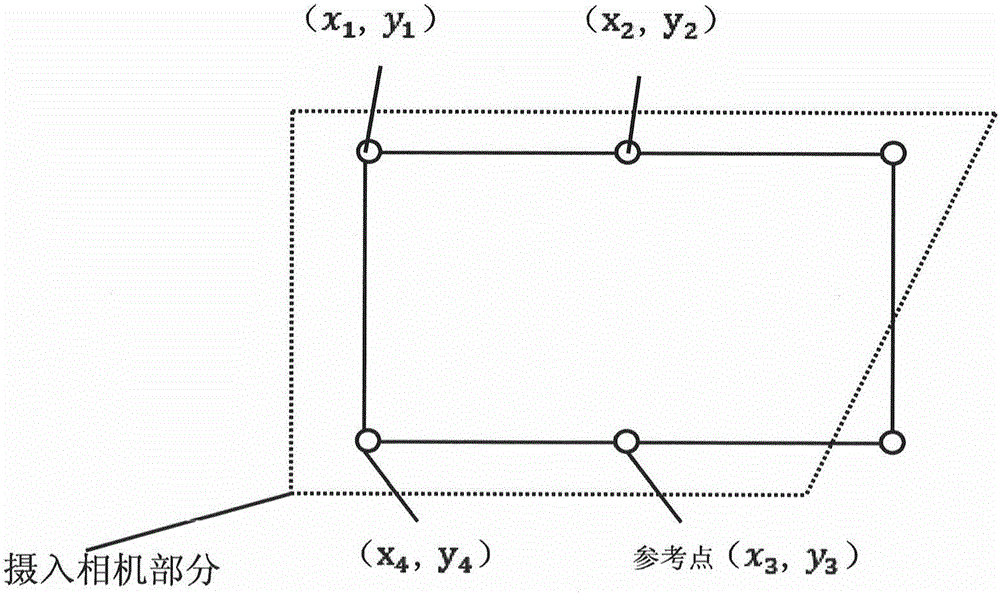
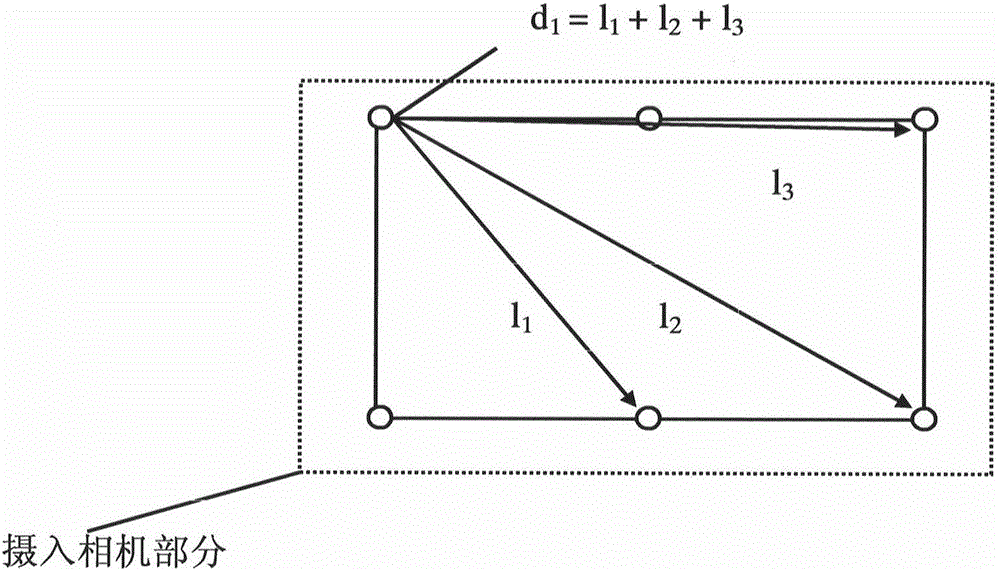
[0051] Step 2: According to the real-time collection of LED flickering points on the game screen by the virtual gun and the parity of LED flickering, the mapping relationship between the collected LED flickering position and the actual position of the LED flickering on the game display screen is established, so as to realize real-time judgment of the relative pose of objects in machine vision.
[0052] The specific implementation method of described step 2 is:
[0053] Step 2.1: Define an odd frame whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More