A robotic end effector in anterior cruciate ligament reconstruction
An end effector and anterior cruciate ligament technology, applied in the field of robotic end effectors, can solve problems such as joint stability degradation, difficulty in grasping accurately, nerve and blood vessel soft tissue damage, etc., to improve accuracy and safety, and straight-line feed The effect of high precision and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
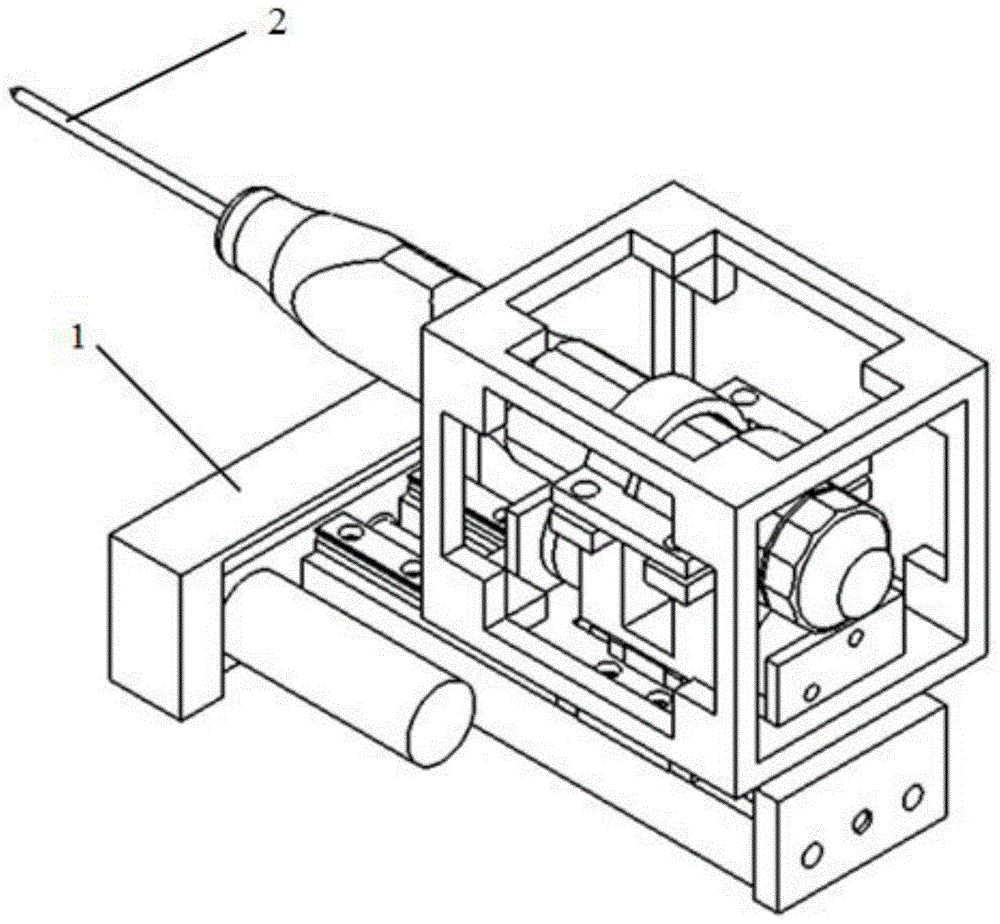
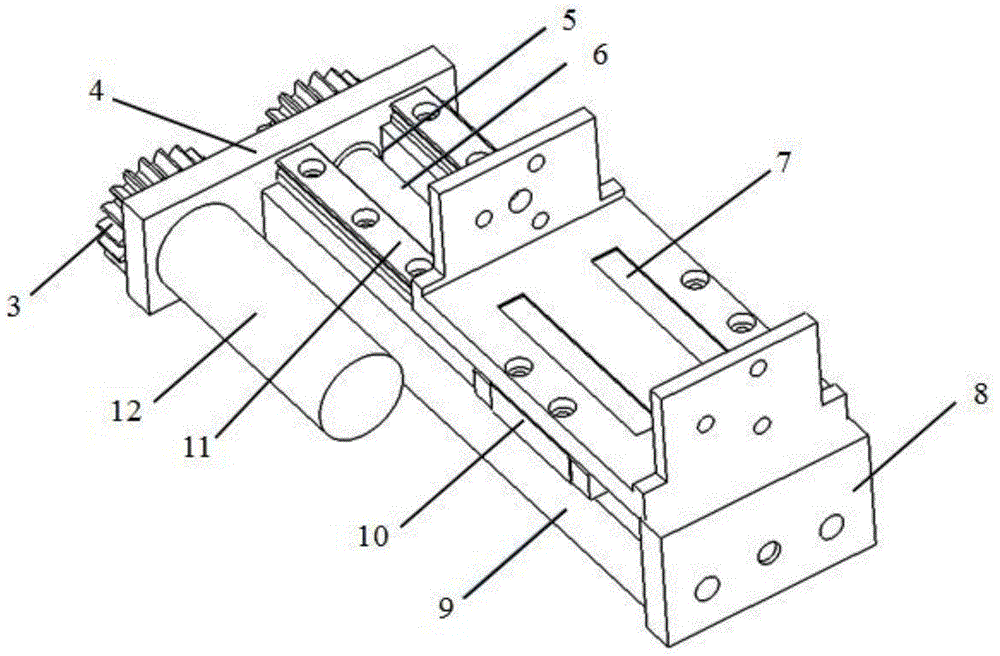
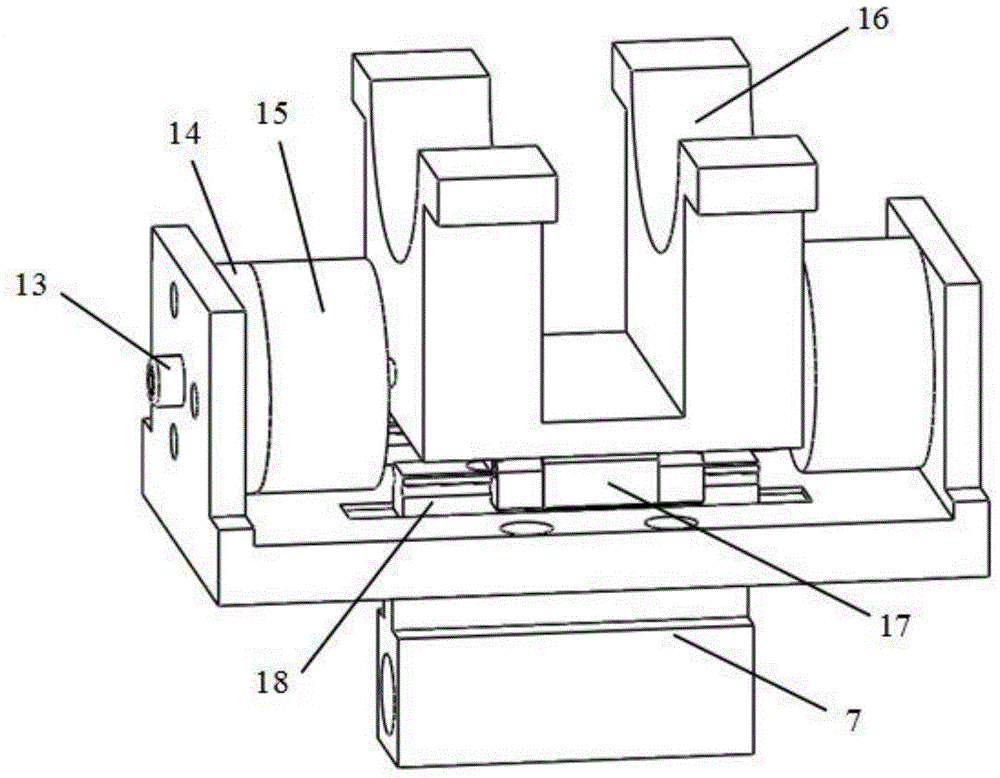
[0018] A robotic end effector in anterior cruciate ligament reconstruction in this embodiment is mainly composed of a linear feed motion component, an operating force measurement component, an electric drill component, and a visual feedback component. The position connection relationship between them is: the linear feed motion component is located at the bottom of the end effector, the visual feedback component is connected to the linear feed motion component through screws, and the electric drill component is located inside the visual feedback component and passes through the operating force measurement component and the electric drill component. The upper and lower end covers 16, 19 of the electric drill holder are connected thereto, and the operating force measurement component is located inside the visual feedback component and is connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com