

Single-leg structure for wheel-legged type robot in leg-arm mixing operation
A robot and wheel-leg technology, applied in the field of bionic mechanisms, to achieve the effect of rich poses, smooth switching, and reduced wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
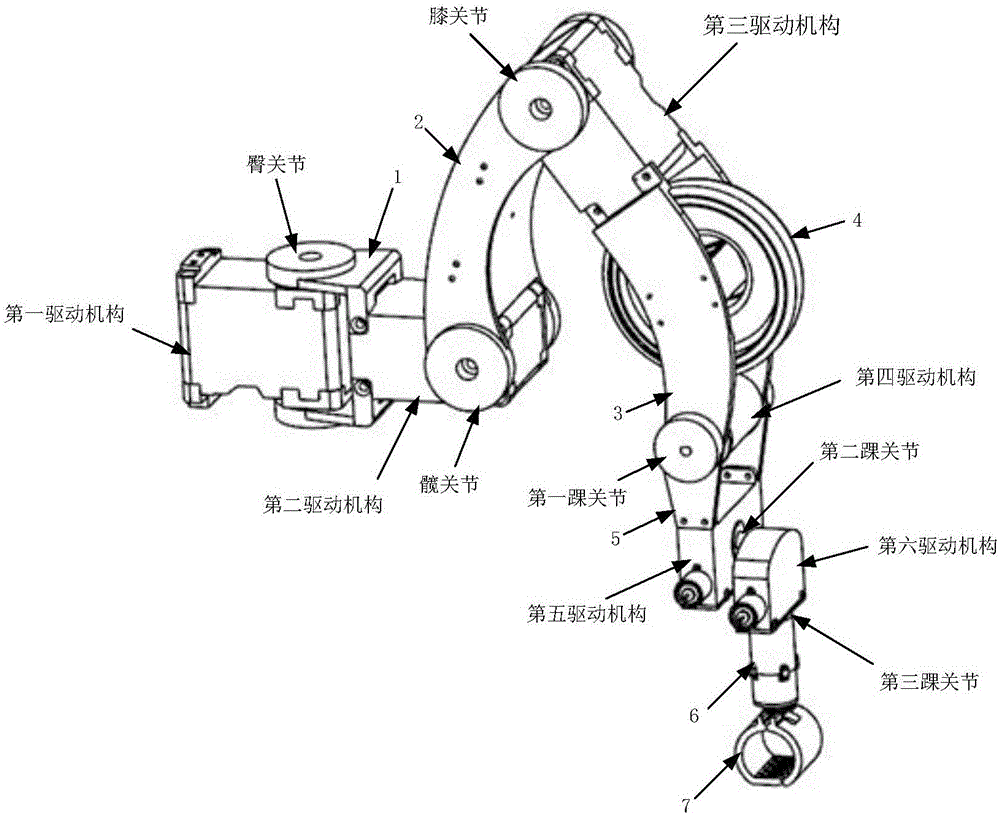
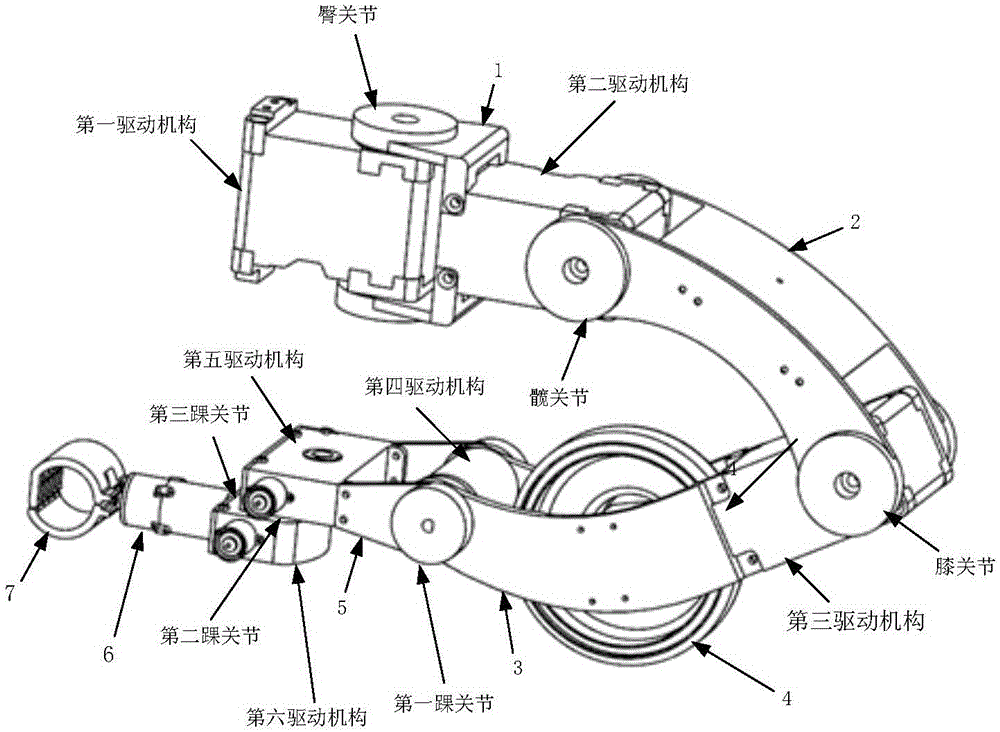
[0038] The single-leg structure of the present invention has 6 joints, which are the hip joint, hip joint, knee joint, first ankle joint, second ankle joint, and third ankle joint from the root of the leg to the front of the leg, passing through the first to sixth joints in sequence. The drive mechanism drives the rotation, such as figure 1 , figure 2 As shown, it also includes a hip joint connector 1 , a thigh bar 2 , a calf bar 3 , a roller 4 , an ankle leg bar 5 , a claw drive mechanism 6 and a claw 7 .
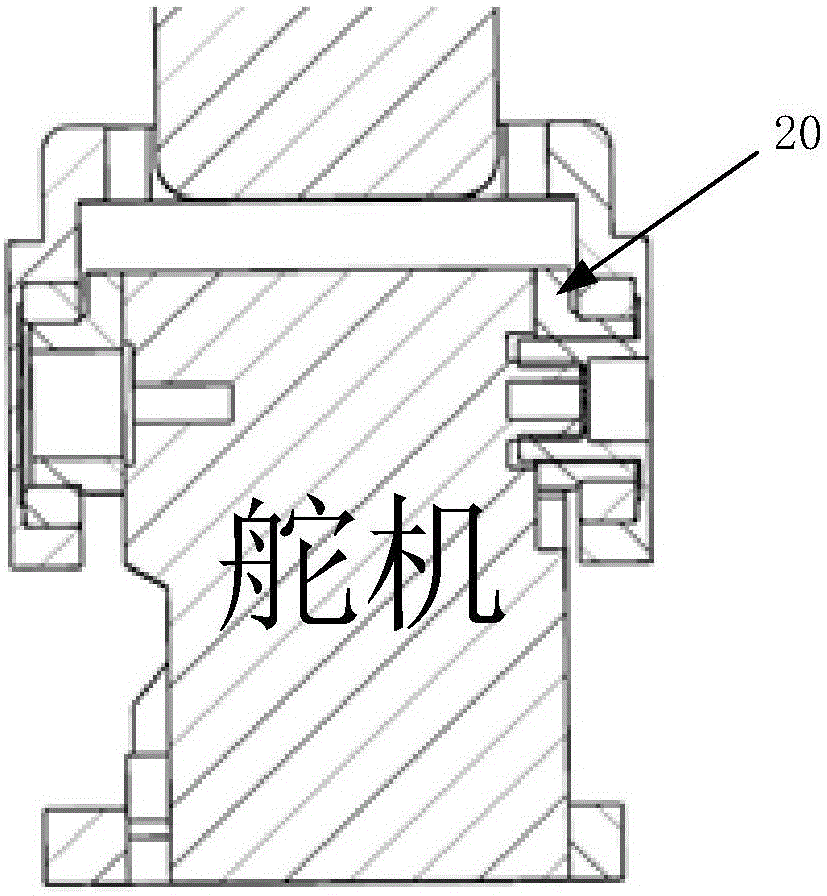
[0039] The first driving mechanism adopts a steering gear, and the output shaft of the steering gear is directly connected to the rear ends of the hip joint connector 1 composed of two side plates to form the hip joint; the hip joint can be driven by the first driving mechanism rotation.
[0040] The second driving mechanism adopts a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More