

Object softness reproduction method based on finger-cot type force touch interaction device
An interactive device and fingertip technology, applied in the input/output process of data processing, instruments, electrical digital data processing, etc., can solve the problems of low control precision, few softness reproduction methods for mobile terminals, etc., and achieve complex algorithms. small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with specific embodiments and accompanying drawings.
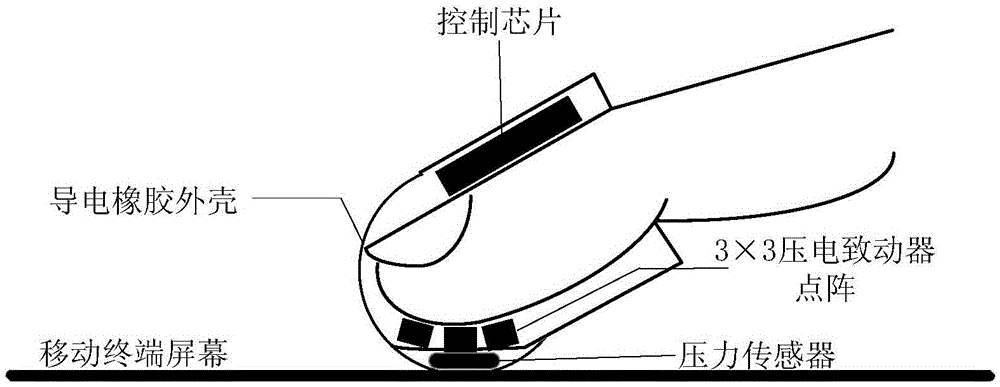
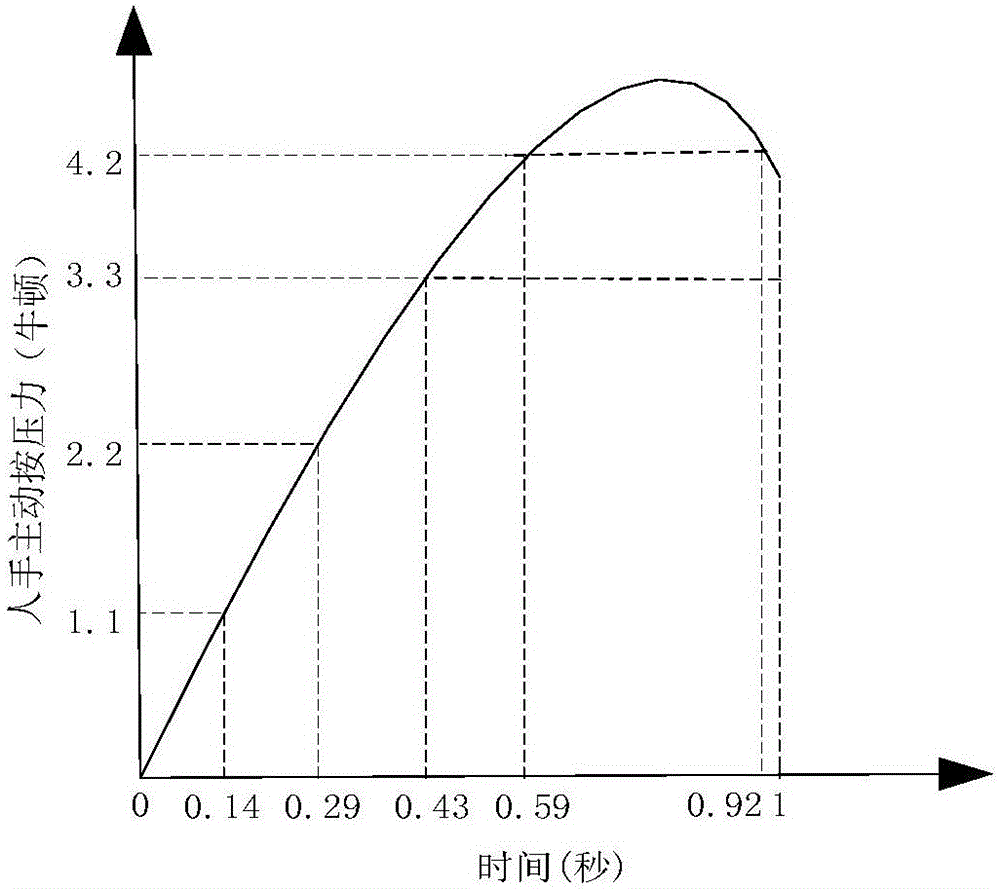
[0027] like figure 1 As shown, the present invention utilizes a fingertip type force-tactile interaction device, which is equipped with a miniature pressure sensor and a 3x3 dot matrix piezoelectric actuator. refer to figure 2 , the basic steps of the object softness reproduction method based on the fingertip haptic interaction device of the present invention: wearing the fingertip haptic interaction device to press the virtual object in the mobile terminal, according to the change of the active pressing force of the human hand and the softness of the virtual object Different, the fingertip piezoelectric actuator will generate vibration stimulation with different vibration amplitudes and vibration rhythms, thereby simulating the tactile sensation in the real environment.
[0028] Taking virtual objects with stiffness coefficients of 0.57N / mm a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More