

Climbing method for a robot capable of climbing steps with any angle of rotation and any step surface
A step surface and robot technology, applied in the field of stair climbing robots, can solve the problems of not being completely parallel, uneven ground, unsuitable for handling, etc., and achieve the effect of a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
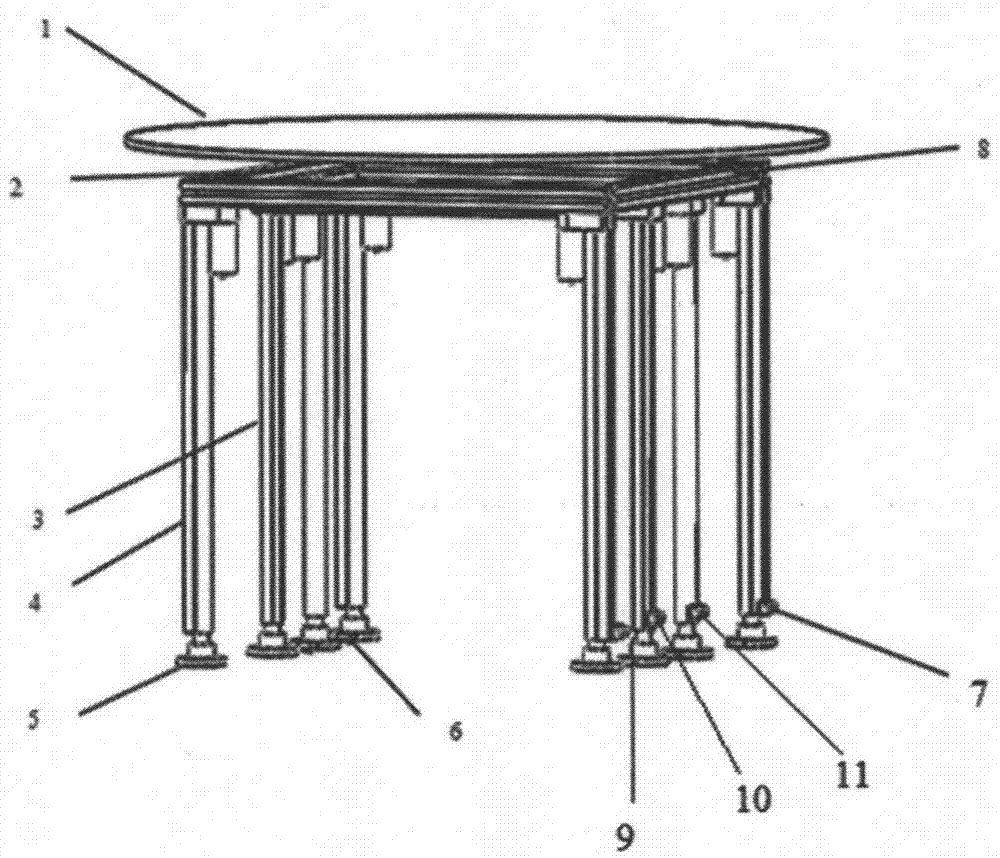
[0024] Such as figure 1 As shown, the robot of the present invention that can climb any angle of rotation and any step surface includes an outer four-leg support structure 4 and an inner four-leg support structure 3, and the outer four-leg support structure 4 includes a first support plate and Four telescopic outer legs fixed on the lower side of the first support board, among the four outer legs, two are located at the front of the first support board, and the other two are located at the rear of the first support board, so The inner four-leg support structure 3 includes a second support plate and four telescopic inner legs fixed on the lower side of the second support plate, and among the four inner legs, two are located at the front of the second support plate , and the other two are located at the rear of the second support plate.
[0025] The first support plate is located on the upper side of the second support plate, and the first support plate and the second support p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More