

Unmanned plane and control method
A control method and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of low cost and achieve the effects of high real-time performance, low cost and long visual detection distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
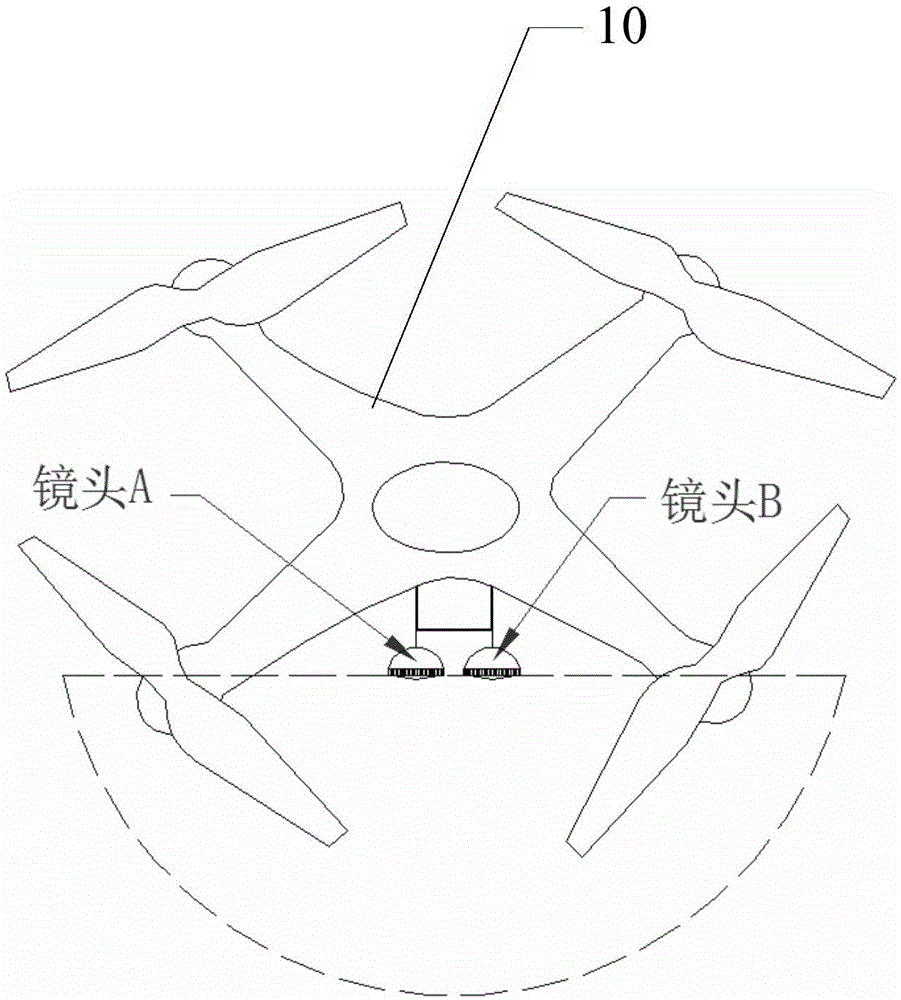
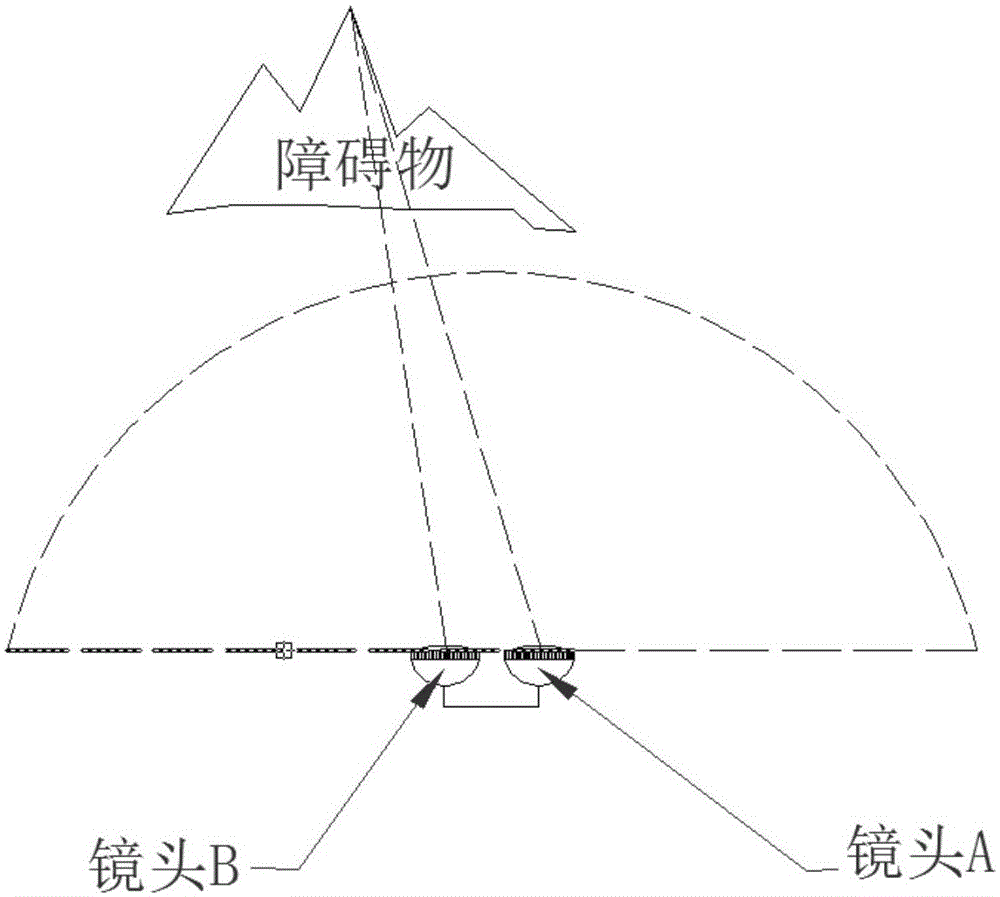
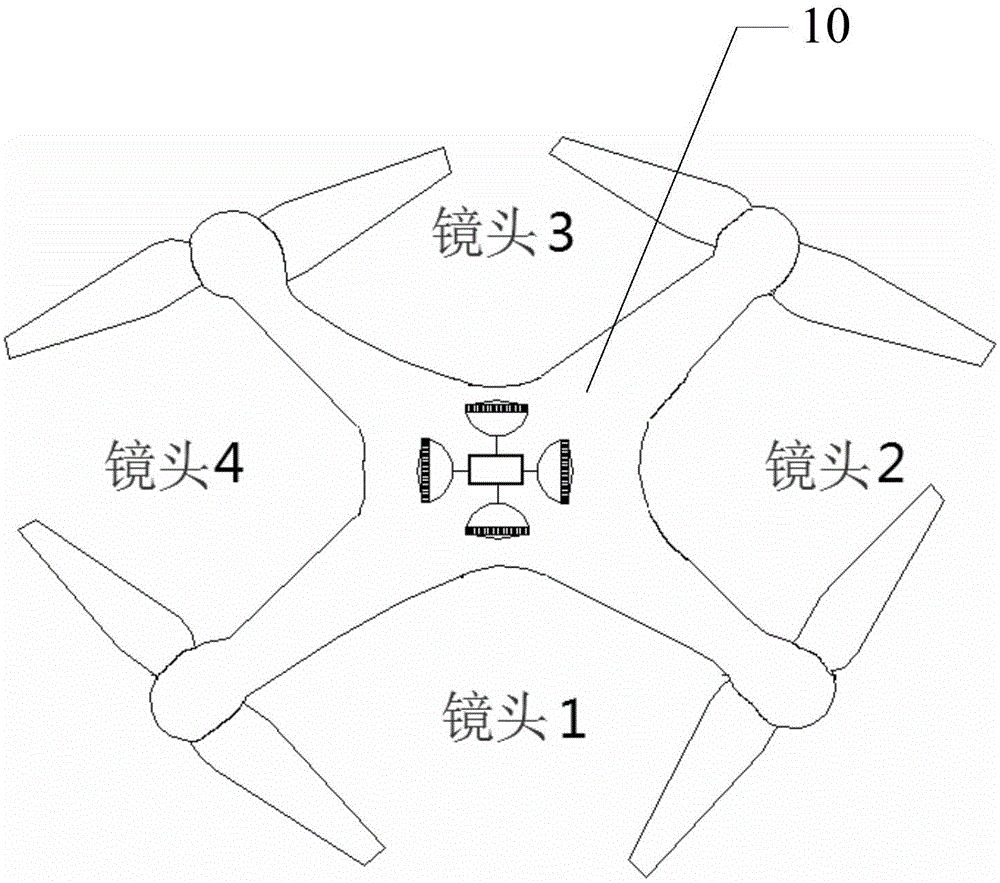
[0025] refer to Figure 1-3 As shown, an unmanned aerial vehicle proposed by the embodiment of the present invention includes a body 10, on which at least two fisheye lenses are arranged, and the shooting angle of view formed by the two fisheye lenses covers a range of 90°-180°.
[0026] The UAV used in the program of this embodiment can be used to remove obstacles because of the coverage of the angle of view of the image taken by the fisheye lens, and the UAV in this embodiment can be an unmanned vehicle that needs to automatically avoid obstacles. Aircraft, driverless cars, and other devices that need to automatically locate obstacles in the field of view in real time and automatically avoid them.
[0027] By being provided with at least two fish-eye lenses (for obstacle detection) on the body 10 of the drone, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More